

DESARROLLO DE LOS TEMAS
UNIDAD 1:
FUERZAS
Unidad 1:
Porque el buque flota. Fuerzas y presiones que actúan sobre el buque. Obra viva. Obra muerta. Resistencia a su marcha. La importancia del punto centro o pivote para la retención y giro de los buques. Reacción de proa y popa durante la caída. Importancia de la inercia. Tiempo muerto y tiempo de retardo. Fuerzas controlables e incontrolables que inciden en las maniobras y gobierno de los buques. La propulsión, distintas formas. Las hélices. Tipos. Cavitación y supercavitación. Gobierno del buque. El timón y su incidencia en la marcha atrás y marcha adelante. Fuerza lateral. Su importancia. Caída del buque.
FUERZAS Y PRESIONES
Fuerzas y presiones:
- Originadas en solidos:
Debido a su estructura de sus partículas (fuertemente unidas y con una distribución regular), los sólidos poseen una forma y volumen fijos. Esto hace que en su interior sólo sea apreciable la atracción que la Tierra ejerce sobre él; es decir, su propio peso. Debido a su rigidez estructural, las fuerzas aplicadas a un sólido se trasmiten por él en su totalidad.
Lógicamente estas fuerzas no podrán nunca superar el límite de la rigidez estructural de ese cuerpo, ya que si no se rompería.
- Originadas en líquidos:
Los líquidos poseen un volumen fijo, aunque su forma se adapta a la del recipiente que los contenga. El interior de un líquido ejerce fuerzas que actúan en todas direcciones y que son perpendiculares a la superficie interior del recipiente que lo contiene.
Cuanto mayor sea la profundidad de un punto en un líquido, mayor será la fuerza que ejercerá, debido a que tendrá un mayor peso sobre él. Estas fuerzas siempre se ejercen desde el interior del líquido hacia las paredes del recipiente, por lo que a la misma profundidad, las fuerzas que ejerce el líquido son de igual intensidad, pero de sentido opuesto. Estas fuerzas dependen de la profundidad del punto, pero son independientes de la forma del recipiente.
- Originadas en gases:
Las partículas de los gases tienden a ocupar todo el volumen del recinto que las contiene. Las fuerzas ejercidas por los gases están provocadas por el constante y caótico movimiento de sus partículas, que chocan unas contra otras, por lo que ejercen fuerzas contra las paredes del recinto. Cuanta mayor distancia haya entre estas partículas, menor es la fuerza que pueden ejercer, por lo que el tamaño del recinto donde se encuentre el gas es inversamente proporcional a la fuerza ejercida por éste.
Fluidos:
La estructura molecular de líquidos y gases hace que sean considerados fluidos, ya que pueden fluir con facilidad, en tanto que los sólidos no pueden, condicionados por su estructura.
· Equilibrio de los sólidos en el seno de los fluidos:
Un cuerpo sumergido en un fluido se ve sometido a fuerzas opuestas y de igual intensidad que se contrarrestan y son perpendiculares a su superficie. La intensidad de estas fuerzas aumenta con la profundidad. Por los tanto, sobre un cuerpo sumergido en un fluido actúan dos fuerzas: el peso, que ejerce la Tierra, y el empuje, que ejerce el propio fluido. Ambas fuerzas actúan en dirección vertical, pero en sentidos contrarios.
El peso actúa hacia abajo y el empuje hacia arriba. Si tanto el cuerpo sumergido como el fluido son homogéneos, el punto donde se aplican estas dos fuerzas en el cuerpo sumergido es el mismo. El centro de gravedad (punto donde se aplica el peso) y centro de empuje coinciden.
En este caso hay tres posibilidades:
· Si el peso del cuerpo es mayor que la fuerza de empuje del fluido, éste se hundirá.
· Si el peso del cuerpo es igual a la fuerza de empuje del fluido, éste quedará en equilibrio en el interior del fluido.
· Si el peso del cuerpo es inferior a la fuerza de empuje del líquido, el cuerpo subirá hacia la superficie del fluido.
Algo parecido ocurre en el caso de la relación de las densidades entre el cuerpo y el fluido. Aquí también caben tres posibilidades (asimismo suponiendo que tanto sólido como fluido sean homogéneos):
· Si la densidad del sólido es mayor que la del fluido, el cuerpo se hundirá.
· Si la densidad de ambos es la misma, el cuerpo permanecerá en equilibrio en el interior del fluido.
· Si la densidad del cuerpo es menor que la del fluido, el sólido ascenderá hacia la superficie de éste.
En caso de que el sólido sea heterogéneo, el centro de empuje y el de gravedad no coinciden. Por tanto, para que haya equilibrio, las fuerzas de peso y empuje, aparte de igualarse, deben de estar en la misma dirección.
· Condiciones de equilibrio:
· La resultante de las fuerzas de peso y empuje debe ser nula.
· Los centros de gravedad y empuje han de estar en la misma vertical.
- Hay tres tipos de equilibrio:
· Estable: El centro de gravedad está por debajo del de empuje. Las fuerzas de empuje y peso son iguales y ambas están en la misma vertical. Los desplazamientos leves no afectan su posición de equilibrio.
· Indiferente: Ambas fuerzas coinciden en el mismo punto. El cuerpo estará en equili-brio en cualquier posición.
· Inestable: Las fuerzas son iguales, pero no están en la vertical del peso, o incluso el centro de empuje está por encima del de gravedad. Esto puede hacer que el cuerpo gire, buscando su posición de equilibrio. Esta rotación se causa al estar las dos fuerzas paralelas en sentido opuesto y en distintas verticales.
· Equilibrio de los cuerpos flotantes:
Cuando un cuerpo flota quiere decir que la fuerza de empuje del fluido es superior al peso del cuerpo. En esta situación, parte del cuerpo queda sumergido y el resto está por encima de la superficie del fluido. Esto quiere decir que el cuerpo desaloja una cantidad de fluido igual a su volumen sumergido.
En un cuerpo flotante, la fuerza de empuje es igual al peso del cuerpo e igual al volumen de fluido desalojado. El empuje disminuye al subir el cuerpo, ya que el volumen de fluido desalojado por un cuerpo flotante es inferior al del cuerpo inmerso en el fluido.
El equilibrio de los cuerpos flotantes se rige por los mismo principios que los de los cuerpos sumergidos. La fuerza de empuje y el peso han de ser iguales y los centros de aplicación de ambas fuerzas deben estar en la misma vertical.
Este equilibrio será más estable cuanto más bajo esté el centro de gravedad del cuerpo. En caso de que el centro de gravedad esté más alto que el de empuje, también pude lograrse un equilibrio estable si la parte sumergida cambia de forma al inclinarse el cuerpo. Al ocurrir esto, el centro de empuje cambia de posición, saliéndose de la vertical del centro de gravedad. Debido a este cambio de posición, se crea un par de fuerzas que hace volver al cuerpo a la posición de equilibrio.
Para que este equilibrio sea estable, la vertical de este nuevo centro de empuje debe cortar al eje de simetría del cuerpo en un punto por encima del centro de gravedad denominado metacentro. Cuanto más bajo esté situado el centro de gravedad, más estable será el equilibrio.
Esta es la razón por la que los barcos y submarinos lleven su parte más pesada (carga, motores, depósitos de lastre) en sus secciones inferiores.
· Presión hidrostática:
Es la que ejerce un líquido en un punto de su interior por acción de la gravedad. Esta presión se manifiesta en forma de fuerzas ejercidas en todas direcciones sobre la superficie de cualquier cuerpo en contacto con el líquido e incluso sobre su propio recipiente.
La fuerza resultante de todas las que actúan sobre un cuerpo sumergido es una vertical y hacia arriba. Esta fuerza es denominada fuerza de empuje. Esta fuerza es más notoria cuanto más sumergido está el cuerpo en el fluido, siguiendo el principio fundamental de hidrostática.
· Principio de Arquímedes:
Este principio enuncia que todo cuerpo sumergido en un fluido experimenta un empuje hacia arriba igual al peso de fluido desalojado. Este fluido desalojado posee el mismo volumen que el cuerpo sumergido. La fuerza de empuje a la que se ve sometido el cuerpo se calcula de igual forma que la presión hidrostática.
Este empuje es directamente proporcional a la densidad del fluido, por lo que en un gas la fuerza de empuje será considerablemente menor que en un líquido.
Aparatos para descender a grandes profundidades:
Estos aparatos, diseñados para ayudar a descender al hombre a un medio que no es el suyo (la adaptación del ser humano al mar es nula), sufren una constante evolución y han de ser diseñados para soportar grandes presiones.
Esto es debido a que la presión aumenta +1 atmósfera cada 10 m de profundidad, por lo que la presión del agua es de 2 atmósferas a 10 m de profundidad y así sucesivamente.
· Traje de buzo:
Traje constituido por un tejido doble de fibra, con caucho en su interior, que es impermeable y está dotado de un cuello que dispone de un aro metálico que permite la fijación de un casco esférico provisto de cuatro mirillas. Para poder contrarrestar el empuje que ejerce el agua sobre él, el traje dispone de unos contrapesos, que se cuelgan del pecho y de la espalda del buzo, de 17 Kg cada uno, y de unas botas lastradas cuyo peso es de 21 Kg por par. El equipo completo pesa unos 300 kg. El aire se le suministra por medio de bombas y un tubo, o de unas botellas de aire comprimido que el propio buzo lleva colgadas a la espalda. La comunicación entre el buzo y el equipo de superficie se verifica o bien a través de una cuerda o mediante una línea telefónica. Este traje permite estancias de tres horas a profundidades de entre 40 y 60 m. Existen asimismo trajes blindados, construidos con elementos de acero y totalmente impermeables, que permiten trabajar a una profundidad máxima de 200 m.
La profundidad práctica límite con un equipo normal se sitúa en los 18 m de profundidad.
Con equipos especiales, en los cuales el nitrógeno del aire para respirar es sustituido por helio o hidrógeno, se ha logrado duplicar la profundidad útil de trabajo, pasando de los 76 a los 152 m de profundidad. A buceadores adaptados a la presión submarina que viven en estaciones a profundidades superiores a los 100 m, se les supone capaces de bucear con trajes flexibles a profundidades que oscilan aproximadamente entre los 400 y 700 m de profundidad.
El submarino y el batiscafo aprovechan inteligentemente los principios de equilibrio de los cuerpos inmersos en fluidos, variando su peso (sin que esto afecte a su volumen, y por tanto al empuje que sufren) para modificar su profundidad.
· Submarino:
El submarino es un buque de finalidad bélica capaz de navegar por debajo del agua, formado por un casco estanco en forma ahusada, subdividido en diversos compartimentos, cuya resistencia determina la profundidad a la que puede sumergirse la nave. El submarino está formado por dos estructuras superpuestas, entre las cuales se sitúan las cámaras de flotación. El submarino está construido con un material reforzado que permite aguantar altas presiones y se divide en compartimentos estancos. Existen dos tipos principales de submarinos: los que disponen de un único casco, que incluye los depósitos de lastre en su interior, y los que están formados por dos cascos, uno de los cuales (hermético) alberga los sistemas de mando e instalaciones para la tripulación, mientras que el segundo confiere su forma externa al navío y alberga los tanques de lastre que ocasionan la inmersión o emersión del buque. La inmersión de la nave se produce al llenar de agua los tanques de las cámaras de flotación. Para emerger se expulsa el agua de estos tanques.
· Batiscafo:
El batiscafo, inventado por el suizo Auguste Piccard en 1.947, es una nave sumergible autónoma destinada a la exploración submarina y con capacidad de realizar exploraciones en las zonas más profundas de los océanos. Está constituido por un depósito lleno de un líquido más ligero que el agua (generalmente, gasolina) y equipado con una barquilla estanca ocupada por los tripulantes, que disponen en ella de mirillas de observación y de los instrumentos científicos necesarios para la realización de las exploraciones. La propulsión horizontal de la nave se logra mediante motores eléctricos.
Con el batiscafo Trieste, Jacques Piccard y Donald Walsh, lograron, en 1.960, sumergirse a 10.960 m. de profundidad en la fosa de las Marianas, en el océano Pacífico. Antes se habían conseguido con ese mismo diseño inmersiones de hasta 4.000 metros de profundidad frente a las costas de Dakar (Senegal) con éxito, aunque sin tripulación.
En 1969, Jacques Piccard diseñó un batiscafo de 15 m de longitud y 135 toneladas de peso para permanecer largos períodos de tiempo a bordo. Con este batiscafo, que se dejaba llevar por las corrientes, permaneció un mes llevado por la corriente del Golfo, estableciendo así con pre- cisión sus características.
· Batisfera:
La batisfera es una gran cámara esférica de buceo hecha de acero diseñada para la explora- ción submarina por el científico norteamericano Charles W. Beebe. La batisfera estaba unida al barco en la superficie por un cable de acero y los ocupantes del ingenio se comunicaban con el barco por teléfono. En 1.934 Beebe descendió a 923 m de profundidad en las proximidades de las Bermudas.
Principio de Pascal:
El principio de Pascal es de singular importancia en hidrostática. Según este principio la presión ejercida sobre un punto de una masa líquida se transmite de forma instantánea y con igual intensidad en todos los sentidos. El principio de Pascal afirma que las presiones ejercidas sobre un líquido se transmiten en el seno de éste de la misma forma en todas direcciones y actúan de manera perpendicular sobre las paredes del recipiente que lo contiene.
Aplicaciones del principio de Pascal:
El objetivo principal de estas aplicaciones del principio de Pascal es el de obtener una gran cantidad de fuerza ejercida sobre una gran superficie a partir de una presión pequeña. La trasmisión de la presión a través de un fluido es utilizada en estos casos para obtener fuerzas eleva- das a partir de fuerzas pequeñas. En ambas aplicaciones se utiliza la incompresibilidad de los líquidos para transmitir una presión a través de ellos.
· Prensa hidráulica:
Las prensas hidráulicas, con las que se alcanzan grandes presiones, de hasta 70.000 toneladas, son máquinas más complejas, basadas no obstante en el simple principio de Pascal, que constan esencialmente de dos cilindros huecos de distinta sección, unidos por un conducto estanco y llenos de agua o aceite, en los que la fuerza ejercida sobre el cilindro menor se transmite aumentada al cilindro mayor, que hace las veces de placa de presión. Normalmente se utilizan para comprimir, con el fin de estrujar, imprimir, estampar o realizar cualquier otra acción semejante.
Toda prensa consta de dos elementos rígidos: uno fijo, en el que se deposita el material a prensar, y otro móvil, que hace presión sobre el primero.
Las prensas hidráulicas basan su funcionamiento en un émbolo que se desplaza por los cambios de presión producidos en el cilindro donde éste se aloja.
· Frenos hidráulicos:
En los frenos hidráulicos, un líquido transmite la presión a las zapatas mediante un émbolo. El émbolo o pistón es un mecanismo consistente en una pieza metálica, que se desplaza por el interior de una cavidad o cilindro, ya sea por acción del fluido. Esta acción puede llevarse a cabo por una cara, en el caso del pistón de efecto simple, o por las dos caras, en el pistón de doble efecto. Por lo general, el émbolo va unido a una biela por medio de un vástago o a través de un bulón. Para el funcionamiento del mecanismo es imprescindible la perfecta estanqueidad entre el émbolo y el cilindro, que se asegura mediante aros o anillos elásticos llamados también segmentos. La estanqueidad del émbolo con el cilindro se consigue mediante estopas o, si la temperatura es elevada, mediante aros metálicos elásticos. La cabeza o superficie de acción del émbolo es, generalmente, plana, si bien puede adoptar distintas formas con el fin de crear turbulencias convenientes; las cabezas de las bombas hidráulicas están provistas de válvulas.
· Vasos comunicantes:
Sistema formado por dos o más recipientes que se comunican entre sí por su parte inferior y que se utiliza en el estudio de la estática de fluidos. Así pues el líquido vertido en uno de ellos alcanzará el mismo nivel en todos, con independencia de la forma y tamaño que tengan. Este hecho encuentra su explicación en la condición de equilibrio (todos los puntos situados en un mismo plano horizontal han de tener la misma presión) y en el teorema fundamental de la estática de fluidos, según el cual la presión en un punto de una masa líquida sólo depende de su densidad y de la distancia de dicho punto a la superficie libre del líquido.
El principio de los vasos comunicantes es aplicado para llevar agua a gran altura en poblaciones, situando los depósitos a un nivel superior. Actualmente esto se logra con la ayuda de bombas. En agricultura se emplean los vasos comunicantes en la creación de pozos artesianos, de los que se obtiene agua que fluye hacia la superficie al estar situado el pozo en la zona más baja de una bolsa de agua circundante.
Otra aplicación importante del principio de los vasos comunicantes es la esclusa. Éste es un complejo sistema hidráulico que permite la navegación por cauces que han de salvar grandes diferencias de nivel. Las esclusas son tramos de canal cerrados por puertas móviles y estancas, y un sistema de bombas para la introducción o achique de aguas. La sección principal del canal se construye normalmente de hormigón armado, mientras que las puertas de entrada y salida son de acero. El funcionamiento de una esclusa consiste, en primer lugar, en igualar el nivel de las aguas del interior de la esclusa con las del tramo de canal en el que se encuentra el buque que se pretende elevar o descender. A continuación, se abren las compuertas de entrada y se introduce el buque en la esclusa, cerrando dichas compuertas de entrada una vez completada la operación.
Luego, la estación de bombeo procede a elevar o bajar el nivel de las aguas contenidas en la esclusa, hasta igualarlo con el del canal de salida. Finalizada esta operación, se pasa a abrir las compuertas de salida, con lo que el buque puede continuar su navegación. Los grandes desniveles se superan mediante una serie de esclusas consecutivas encadenadas. Una de las esclusas más conocidas es la del canal de Panamá, donde los barcos que pasan del Atlántico al Pacífico deben subir de nivel para pasar de un océano a otro y viceversa.
Presión en los gases:
La presión que ejerce un gas sobre las paredes del recipiente que lo contiene es la misma en todas partes y no es dependiente del peso del gas, excepto en el caso concreto de la presión atmosférica.
· Manómetro:
El manómetro es un instrumento destinado a medir la diferencia de presión entre dos fluidos o entre dos puntos de un mismo fluido. En su versión básica, consta de un tubo en forma de U que generalmente contiene mercurio. Hay dos tipos: de rama cerrada o de rama abierta. Cuando la presión es la misma en las dos ramas, el nivel de fluido en ellas es el mismo. Si una de las ramas tiene una presión superior a la otra, el fluido se desnivela El cálculo de la diferencia de presión se realiza aplicando la fórmula de la presión hidrostática a la diferencia de nivel del fluido en ambas ramas.
Si el manómetro es de rama cerrada, la altura de la columna de fluido será la presión del gas. En cambio, si el manómetro es de rama abierta, la presión del gas se calculará sumando o restando la presión atmosférica a la presión hidrostática obtenida. Un valor negativo de lectura correspondería a un vacío parcial.
En manómetros más complejos y cómodos, el fluido a medir empuja un émbolo unido a un dispositivo elástico, y éste hace girar una aguja que indica sobre una escala graduada la presión efectuada.
Las presiones bajas de un gas se miden con el dispositivo McLeod, capaz de medir hasta 10 de mercurio de presión absoluta. Este aparato toma un volumen conocido del gas que se quiere medir, lo comprime a temperatura constante a un volumen mucho menor y mide su presión directamente con un manómetro. La presión desconocida se calcula aplicando la ley de Boyle-Mariotte. Para presiones aun más bajas se emplean métodos basados en la radiación, ionización o los efectos moleculares.
Las presiones que admiten los manómetros oscilan entre los 10 y 10 mm de mercurio de presión absoluta en mediciones de alto vacío, hasta miles de atmósferas, como en el caso de las prensas y controles hidráulicos. En experimentaciones se han obtenido presiones del orden de millones de atmósferas, y la fabricación de diamantes artificiales exige presiones cercanas a las 70.000 atmósferas, a temperaturas que rondan los 3.000º C.
Por último se entiende como “presión parcial” la presión efectiva que ejerce un gas determinado en una mezcla de éstos. La presión atmosférica total es la suma de las presiones parciales de los gases que la componen (oxígeno, nitrógeno, dióxido de carbono y gases nobles).
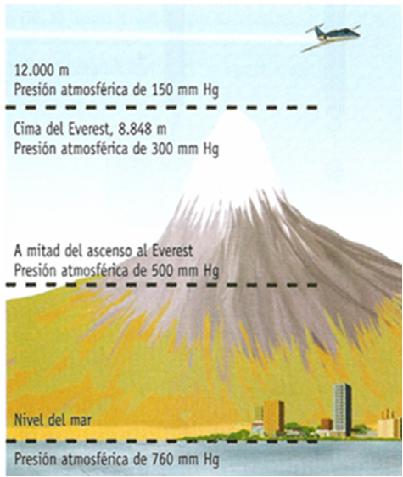
· Presión atmosférica:
En el caso de la atmósfera, la presión ejercida por el aire no es igual en todos sus puntos, por lo que se le considera un caso especial. La presión atmosférica se define como la presión que ejerce la atmósfera sobre los cuerpos sumergidos en ella. En un nivel concreto, la presión atmosférica es igual al peso de la columna de aire existente encima de dicho nivel. Al nivel del mar, su valor normal se considera de 760 mm de mercurio (1.013 milibares), mientras que a una altura de 5.500 m este valor se reduce a la mitad, llegando a desaparecer a 173 Km. de altura. Lo que, traducido a Pascales, equivale a una presión de 101.325 Pa al nivel del mar, que disminuye hasta unos 2.350 Pa a 10.700 m de altura.
En el ámbito de la meteorología el control de esta presión es muy importante para predecir el tiempo. El aire frío pesa más que el caliente, y éste es uno de los factores que influyen en las diferencias de presión atmosférica a un mismo nivel. Además, los anticiclones (áreas atmosféricas con buen tiempo) y las borrascas (zonas antagónicas a las anteriores) generan corrientes de aire en sentido vertical que modifican sustancialmente el valor de la presión atmosférica, circunstancia que se utiliza de forma importante en la previsión de la evolución del tiempo.
La disposición que adoptan las isobaras configura unas formas denominadas campos de presión, por cuanto en realidad los delimitan y sitúan: altas presiones o anticiclones, bajas presiones o depresiones, dorsales, collados, vaguadas. Los campos de presión estables en el tiempo, o poco variables, se denominan centros de acción, ya que son los que regulan las masas de aire y la circulación de los vientos y con ellos la creación o disipación de las nubes.
· Barómetro:
El barómetro es un instrumento utilizado para medir la presión atmosférica inventado por el italiano Torricelli en 1643. Su barómetro de mercurio consistía en un tubo de vidrio, cerrado por la parte superior, lleno de mercurio y sumergido en una cubeta con el mismo líquido. La presión atmosférica que actúa sobre la cubeta mantiene el nivel del mercurio en el tubo, equilibrando su peso, de modo que la altura alcanzada es tanto mayor cuanto mayor sea la presión atmosférica cuando se efectúa la medición. Modelos perfeccionados fueron construidos por Regnault, Fortin y Tonnelot. Los actuales barómetros de mercurio están formados por un tubo de vidrio de 85 cm de altura, cerrado por el extremo superior y abierto por el inferior. La medición de la presión atmosférica al nivel del mar oscila entre los 737 y los 775 mm de mercurio.
Esta oscilación es debida a la latitud (con la consecuente variación de la fuerza de la gravedad), la temperatura y el diámetro del tubo. Aún así, y aplicando las debidas correcciones a las mediciones por estas variables, el barómetro de mercurio puede tener una precisión de hasta 0,1 mm. El barómetro aneroide, también denominado metálico, fue inventado por Vidi y se fundamenta en la deformación elástica que experimenta, bajo la acción de la presión atmosférica, una caja metálica plana y de paredes delgadas en la que se ha hecho el vacío,
la deformación elástica se transmite a una aguja que se desplaza en una escala graduada. El barómetro de Bourdon consiste en un tubo flexible, cerrado y curvado en forma de herradura, en cuya interior reina el vacío. Las variaciones de presión del aire modifican la curvatura del tubo y estas modificaciones se registran en una escala. El barómetro registrador o barógra fo está formado por varias cápsulas anaeroides que mueven una aguja inscriptora que registra de forma continuada, sobre un cilindro de papel móvil, los valores de la presión atmosférica durante un período de tiempo.
Leyes de los gases:
· Ley de Boyle-Mariotte:
Ley según la cual, a temperatura constante, los volúmenes ocupados por una masa de gas perfecto son inversamente proporcionales a las presiones a que se halla sometida. Es decir, el producto de la presión por el volumen se mantiene constante: p V = constante.
Si sobre un gas, a temperatura constante, se le aplica una presión doble a la que tenía al principio, verá su volumen reducido a la mitad. En caso de que la presión inicial se redujese a la mitad, manteniendo constante la temperatura, el gas duplicaría su volumen.
· La ley de Gay-Lussac y Charles relacionan asimismo la presión con la temperatura y el volumen con la temperatura.
Se obtiene así que la presión y la temperatura de un gas a un volumen constante son magnitudes directamente proporcionales y que el volumen de un gas es directamente proporcional a la temperatura si la presión no varía.
Se interrelaciona la presión, el volumen y la temperatura de un gas y expresa la ley general de los gases. Esta ley enuncia que para una misma masa de un gas, el producto de la presión por el volumen partido por la temperatura es constante.
PORQUE FLOTA UN BARCO?
Mecánica de Fluidos
La mecánica de fluidos es la rama de la física que estudia los comportamientos de los gases y los líquidos en las diferentes circunstancias y sus distintas propiedades.
Presión
Para entender interacción entre liquido y las paredes conviene introducir el concepto de presión que se obtiene dividiendo la fuerza entre el área sobre la cual actúa la fuerza.
Esta magnitud se puede expresar en cualquier unidad de fuerza y en cualquier cantidad de área. Esto equivaldría a la presión que ejerce un billete sobre una mesa.
Presión de un líquido:
Cuando se nada en el agua se siente una presión contra los tímpanos. Entre más profundo se nade, mas fuerte será esa presión, esto se debe al peso que esta encima de nosotros. La presión ejercida por un líquido depende de la profundidad. Así mismo también depende de la densidad del líquido, si te sumerges en un líquido más denso, la presión será mayor.
Presión de un liquido= Densidad del liquido x Profundidad
Presión Atmosférica
Vivimos en el fondo de un océano de aire. La atmósfera al igual que el agua ejerce una presión. Así como la presión se debe al peso del agua, la presión atmosférica se debe al peso del aire. Así es, el aire tiene un peso. La razón por la que no sentimos este “aplastamiento” es por que nuestro cuerpo la presión dentro de nuestros organismos es igual a la del aire que nos rodea. No hay fuerza neta que podamos sentir.
La Presión atmosférica es el peso que ejerce el aire de la atmósfera como consecuencia de la gravedad sobre la superficie terrestre o sobre una de sus capas de aire.
Como se sabe, el planeta tierra está formado por una presión sólida (las tierras), una presión liquida (las aguas) y una gaseosa (la atmósfera).
La atmósfera es la capa gaseosa que envuelve todo el planeta y está formado por mezcla de gases que en conjuntos llamamos aire, como todos los cuerpos, tiene peso, el cual ejerce una fuerza sobre la superficie terrestre es lo que llamamos presión atmosférica.
La presión atmosférica varia, no siempre es igual en los diferentes lugares de nuestro planeta y nuestro país, ni en la diferente época del año.
Como podemos ver la presión ejercida. Por lo atmosférica se debe al peso (P: m.z) de la misma su valor es de 1001.000 páscales que corresponde a la presión normal. Existen otras unidades para medir la presión y la equivalencia entre estos son: 101.000 Pa = 1 atm = 760 mm Hg = 101 mb.
Barometro de Torricelli
Es un instrumento para medir la presión atmosférica; es decir, la fuerza por unidad de superficie ejercida por el peso de la atmósfera. Este fenómeno fue descubierto por Evangelista Torricelli, un físico y matemático italiano del siglo XVII.
Descubrió que el agua no ascendía atraída por este vacío, sino que era la presión normal del aire la que provocaba que ascendiese. Para comprobar su teoría, utilizó mercurio: como era sabido la densidad de éste es 13,5 veces mayor que la del agua, por lo que esta presión del aire debería poder levantar sólo 1/13,5 veces la altura del agua; es decir, aplicado sobre 10 metros del agua, nos daría algo más de 75 centímetros en el caso del mercurio. Para ello llenó un tubo de vidrio de 1,80 metros de longitud con mercurio, tapó el tubo y lo le dio la vuelta sumergiéndolo en un recipiente mayor con mercurio; entonces retiró el tapón del tubo, y pudo observar que de él escapaba parte del mercurio, pero se quedaba 76,2 centímetros de longitud, corroborando de esa forma lo que él suponía que sucedería. Además pudo comprobar que esa medición variaba de unos días a otros, por lo que interpretó que la atmósfera tenía presiones variables en el tiempo.
Cuanto mayor es la altitud tendremos una menor presión atmosférica, ya que al tener menos masa de aire esta tiene menos peso. Y además el aire húmedo es menos pesado que el seco, luego también hace disminuir la presión atmosférica el aire húmedo.
Prensa de Pascal
La presión aplicada en un punto de un líquido contenido en un recipiente se transmite con el mismo valor a cada una de las partes del mismo.
Este enunciado, obtenido a partir de observaciones y experimentos por el físico y matemático francés Blas Pascal (1623-1662), se conoce como principio de Pascal.
El principio de Pascal puede ser interpretado como una consecuencia de la ecuación fundamental de la hidrostática y del carácter incompresible de los líquidos. En esta clase de fluidos la densidad es constante, de modo que de acuerdo con la ecuación p = po + · g · h si se aumenta la presión en la superficie libre, por ejemplo, la presión en el fondo ha de aumentar en la misma medida, ya que · g · h no varía al no hacerlo h.
La prensa hidráulica constituye la aplicación fundamental del principio de Pascal y también un dispositivo que permite entender mejor su significado. Consiste, en esencia, en dos cilindros de diferente sección comunicados entre sí, y cuyo interior está completamente lleno de un líquido que puede ser agua o aceite. Dos émbolos de secciones diferentes se ajustan, respectivamente, en cada uno de los dos cilindros, de modo que estén en contacto con el líquido. Cuando sobre el émbolo de menor sección S1 se ejerce una fuerza F1 la presión p1 que se origina en el líquido en contacto con él se transmite íntegramente y de forma instantánea a todo el resto del líquido; por tanto, será igual a la presión p2 que ejerce el líquido sobre el émbolo de mayor sección S2, es decir: p1 = p2
y por tanto:
Si la sección S2 es veinte veces mayor que la S1, la fuerza F1 aplicada sobre el émbolo pequeño se ve multiplicada por veinte en el émbolo grande.
La prensa hidráulica permite amplificar la intensidad de las fuerzas y constituye el fundamento de elevadores, prensas, frenos y muchos otros dispositivos hidráulicos de maquinaria industrial.
Arquímedes
“Un cuerpo sumergido sufre un empuje hacia arriba por una fuerza igual al peso del fluido que desplaza”
Esta relación se llama principio de Arquímedes y se aplica a los fluidos, Si un cuerpo sumergido desplaza 1kg de fluido la fuerza de flotabilidad que actúa sobre el es igual a 1 kg.
Porque flota un barco
¿Nunca se han preguntado por qué algo tan grande y pesado como un barco flota, y una simple puntilla se hunde? Pues Arquimides sí se lo preguntó, y encontró a una respuesta a ello.
Los barcos flotan porque son menos densos que el agua…
¿Qué significa esto? ¿Qué es densidad?
Densidad es la cantidad de materia o masa que existe por unidad de volumen. La mayoría de los barcos son de un metal que se hunde con facilidad, éstos ocupan un gran volumen, es decir son grandes. Una esfera de 1 m cúbico de hierro sin duda se hundirá en el fondo del mar. si ahora hacemos una esfera hueca con ese mismo metro cúbico de hierro, su volumen será mucho mayor que el de la esfera sólida, y con la ayuda del empuje del agua hacia arriba (Principio de Arquímedes), ésta flotará.
Un objeto que está hueco tiene poca densidad, porque en su mayoría esta lleno de aire. Este ejemplo también se puede aplicar en los barcos; aunque sean de hierro, flotan en el agua a causa del aire que tiene dentro. En el caso de que se le haga un agujero en el casco, como paso con el legendario Titanic, el agua entrará expulsando el aire hacia fuera, entonces la densidad de barco será mayor que la del agua y el barco se hundirá.
Cuando sumergimos un barco en el agua, éste desaloja una parte del volumen que antes ocupaba el fluido, empujándolo hacia fuera. Como consecuencia, el agua empuja al barco en todas las direcciones y perpendicular al casco, hacia dentro.
Es decir, existe una fuerza que empuja al barco de abajo hacia arriba haciéndolo flotar. Arquímedes , señaló dos mil años atrás el principio de porqué los objetos flotan: “Cuando sumergimos un objeto en el agua éste flota por una fuerza igual al peso del líquido que desplaza.”
Arquimides se metió en una tina con agua y se dio cuenta que entre más se sumergía, más agua se desbordaba de la bañera y más liviano se sentía, porque al meter algo en el agua, ésta sube de nivel y si el objeto es grande se derrama. Lo anterior se origina en que la presión del agua va aumentando conforme aumenta la profundidad. De modo que es mayor la presión en el fondo del barco que en las parte superiores.
Conclusiones
La ley de la Flotabilidad de Arquímedes indica que si sumergimos un cuerpo en un fluido este sufre un empuje vertical hacia arriba igual al peso del volumen de fluido desalojado. Así, si el cuerpo es menos denso que el líquido, este, flotará y si es más denso, se hundirá. Esta razón por la que flotan todos los barcos, la cantidad de agua desplazada es igual al volumen de hierro más el aire dentro del casco y aunque el hierro es más denso que el agua, el aire es menos denso y hay siempre más volumen de aire que de hierro.
Pivote es un término que procede de la lengua francesa (pivot). El concepto puede utilizarse para nombrar a la punta de un objeto sobre la que se introduce o se sostiene otro objeto diferente, logrando que uno esté en condiciones de girar sobre el otro. Este tipo de pivotes es habitual en mecanismos formados por diversas piezas que interactúan entre sí.
inercia
s. f.
1. Tendencia de los cuerpos a oponerse a cualquier cambio de su estado de reposo o movimiento.
2. Falta de energía física o moral para alterar una costumbre o un modo de actuación: salía con sus amigos por inercia, aunque en muchas ocasiones no le apeteciera.
3. Incapacidad que tienen los cuerpos de modificar por sí mismos el estado de reposo o de movimiento en que se encuentran.
Diccionario Manual de la Lengua Española Vox. © 2007 Larousse Editorial, S.L.
La inercia es la propiedad de los cuerpos de no modificar su estado de reposo o movimiento uniforme, si sobre ellos no influyen otros cuerpos o si la acción de otros cuerpos se compensa.
En física se dice que un sistema tiene más inercia cuando resulta más difícil lograr un cambio en el estado físico del mismo. Los dos usos más frecuentes en física son la inercia mecánica y la inercia térmica. La primera de ellas aparece en mecánica y es una medida de dificultad para cambiar el estado de movimiento o reposo de un cuerpo. La inercia mecánica depende de la cantidad de masa y del tensor de inercia del cuerpo. La inercia térmica mide la dificultad con la que un cuerpo cambia su temperatura al estar en contacto con otros cuerpos o ser calentado. La inercia térmica depende de la cantidad de masa y de la capacidad calorífica.
Las llamadas fuerzas de inercia son fuerzas ficticias o aparentes para un observador en un sistema de referencia no-inercial.
Un ejemplo son las fuerzas centrífugas y de Coriolis, que aparecen en los sistemas de rotación.
El tiempo muerto: dead time en los procesos
Un Tiempo de Retardo defiere a respuesta amortiguada de un proceso, desde que se produce un cambio en la variable de manipulada (por ejemplo cambiando la posición de un buque) hasta tener un cambio en la variable de proceso: el efecto inicial de un cambio es visto inmediatamente, pero la efecto final se toma un tiempo para realizarse o completarse.
El Tiempo Muerto, por el contrario, refiere a un periodo de tiempo durante el cual hay un cambio en la variable manipulada pero que no produce NINGUN tipo de efecto en la variable de proceso: el proceso aparece como “muerto” por algún tiempo antes de mostrar su respuesta.
Hay un periodo de tiempo donde la respuesta es MUERTA y no hace absolutamente nada después del step-change o scalon de la salida.
El tiempo muerto es el de lejos el peor problema para los sistemas de control comparado con el tiempo de retardo.
Las funciones de tiempo muerto también producen desplazamiento de fase que se incrementa con la frecuencia, pero ahí NO tienen un límite máximo de desplazamiento de fase.
Esto significa que un simple tiempo muerto en un lazo de control realimentado es capaz de producir cualquier cantidad de desplazamiento de la fase dada una frecuencia. Es más, la ganancia de una función de tiempo muerto no se amortigua con la frecuencia, a diferencia de la función de retardo.
Todos los instrumentos digitales tienen un tiempo muerto debido a su naturaleza de operación: procesan señales en intervalos discretos de tiempo. Usualmente, la cantidad de tiempo muerto que se aprecia en los instrumentos digitales modernos es muy corto para producir
FUERZAS:
Desarrollo
Fuerzas Internas: Propias controlables
Son aquellas que surgen de los elementos que el buque posee a bordo y que están a disposición del Personal responsable del barco.
- Órganos de gobierno: timón
- Órganos de propulsión: elementos que producen el empuje del buque (hélice, chorro de agua…)
- Amarras: Cabos y cables, defensas.
- Equipos de fondeo: Cabrestante, anclas y cadenas.
Fuerzas externas: Impropias o incontrolables
Son aquellas fuerzas propias de la naturaleza que inciden sobre el buque sin que el personal de a bordo las pueda controlar, incidiendo en su comportamiento.
- Vientos: masa de aire en movimiento
- Corrientes: Oceánicas, mareas, de la pendiente de los ríos y las originadas por el viento.
- Olas: Movimiento originado en la superficie del agua por la acción del viento.
Objetivos:
Conocer cuales son los efectos que provocan en un buque estas fuerzas, porque inciden en la seguridad, derrota, gobierno y maniobras ya sea en el mar o en el atraque a un muelle, como así también en la economía y rendimiento del mismo.
Órganos de gobierno
Maniobra: Arte de saber aplicar los conocimientos que requieren los buques para su seguridad, aplicando acciones para lograr un movimiento de traslación acorde a las condiciones del tiempo imperante, establecer sus posiciones y ejecutar las acciones para un correcto atraque, amarre a una boya o acoderamiento a otra embarcación.
Gobierno del buque: Conjunto de acciones que permiten que un buque se mantenga una dirección determinada o que evolucione adecuadamente para la realización de una maniobra, manteniendo siempre su control.
Carena
Carena se denomina al volumen limitado por el casco y por la superficie de flotación un buque. También puede denominarse carena al volumen sumergido.
Coeficiente de flotabilidad
La obra viva es la parte del buque por debajo de la superficie de flotación, por tanto, correspondiente a la carena. La parte superior es la obra muerta, y se consideran espacios de la misma a casco, desde la flotación hasta la cubierta más alta que sea continua, resistente y estanca, y a las superestructuras que sean estancas. La obra muerta es, también, la reserva de flotabilidad que tiene el buque para hacer frente a un incremento del volumen sumergido. Con respecto a la obra viva y a la obra muerta, podemos hablar de la superficie y del volumen de cada una de ellas. Por ejemplo, la superficie de la obra viva será la superficie mojada del casco.
· Se define como coeficiente de flotabilidad la relación entre el volumen de la obra muerta (reserva de flotabilidad) y el volumen de la obra viva (carena).
· Coeficiente de flotabilidad = Obra muerta / Obra viva
Introducción a la maniobra
Maniobrabilidad, Habilidad para parar, para girar, para gobernar, Desarrollo del “ojo marinero”, Apreciación de velocidad y distancia, cualidades de maniobra de los buques, Efectos del calado, Potencia de máquinas, Tipo de propulsor, Uso del telégrafo, Buena utilización de la inercia, Conclusiones, Energía y principio de su conservación, Inercia, aceleraciones, Distancia necesaria para detener un buque.
PRINCIPIOS DE PROPULSIÓN DE BARCOS
Propulsión de barcos
Una embarcación se mueve por el agua propulsada por elementos, tales como ruedas de paletas o hélices. Estos elementos imparten velocidad y movimiento de la embarcación a una columna de agua en la dirección opuesta a la dirección en la que se desea mover la embarcación. Una fuerza, llamada fuerza de reacción (porque reacciona a la fuerza de la columna de agua) es desarrollada contra el elemento de velocidad-impartida. Esta fuerza, también llamada empuje, se transmite al barco y hace que la embarcación se mueva a través del agua.
La hélice marina es el elemento de propulsión usado en casi todas las embarcaciones navales. El empuje desarrollado en la hélice se transmite a la estructura del barco por el eje principal por la presión del empuje desarrollado (ver Fig.). El eje principal se extiende del eje del engrane de reducción principal a la reducción de la hélice. Se apoya en alineación por los cojinetes de suspensión, los cojinetes de retención a popa y los cojinetes de apoyo. El empuje, actuando en el eje de propulsión como un resultado del efecto del empuje de la hélice, se transmite a la estructura de la embarcación por el buje de empuje principal. En la mayoría de las embarcaciones, se localiza al final del eje principal dentro de la caja de reducción principal. En algunos grande barcos, sin embargo, el buje del eje principal se localiza más lejos a popa en un espacio de maquinaria o en un claro del eje.
El engrane de la reducción principal conecta al movedor primario (motor) al eje. La función del reductor principal es reducir las altas revoluciones del motor y dejar que la hélice opere a una velocidad más baja. En esta manera ambos el motor y el eje de la hélice giran a su velocidad más eficiente
¿Que partes conforman el sistema?
El sistema de propulsión mecánica formado por motor-eje-hélice es el más utilizado en los buques de mayor tonelaje. Cuando se analiza la maniobrabilidad de un buque lo primero a tener en cuenta, junto con el número y tamaño de las hélices y timones, son la potencia y el tipo de motor utilizado. A igualdad de factores cuanto mayor sea la potencia de maquinas de un buque, tanto mas fácil resultar maniobrarlo.
Actualmente existen diferentes tipos de sistemas de propulsión, así como aplicaciones. Se han hecho muchas investigaciones para tratar de obtener el sistema más eficiente y poder bajar los costos de operación (consumo de combustible) sin sacrificar el desempeño o vida de la embarcación, intentos de diseños radicales se han hecho sin obtener resultados, pero algunos otros han tenido éxito y han ido ganando popularidad conforme el campo marino se da la oportunidad de probar alguno de ellos, de cualquier manera, algunos de los diseños clásicos también han cambiado y aquí se mencionan los más comunes:
Hélices de paso fijo
· Hélices de paso variables
· Hélices de paso controlable
· Sistemas de tobera
· Azimutales
· Water jets
Estos son solo algunos ejemplos de ellos para que el lector conozca las ventajas de cada equipo.
Todos ellos tienen aplicaciones en común y estas son algunas de sus características:
· La más común debido a su relativo “bajo costo” es la helice de paso fijo, estas hélices también se conocen como de “paso constante”, esto quiere decir que el paso en toda la superficie del aspa (excepto los ángulos de aspa) no cambia, son usadas en la mayoría de las embarcaciones comerciales como remolcadores, arrastraros, pesqueros, etc.
· Hélices de paso variable. Como se mencionaba, la mayoría de las hélices tienen un paso constante, pero hay algunas aplicaciones especiales (grandes barcos o embarcaciones de velocidad) donde la necesidad de obtener la máxima eficiencia posible es imperativa. En estas hélices, el paso puede variar en cada radio (dependiendo del diseño), pero es mas común encontrarse aquellas donde usualmente se reduce el paso cerca de las puntas para reducir la presión de las aspas y la posibilidad de cavitación.
· Hélices de paso controlable. Estas hélices permiten al operador ajustar el paso a voluntad dependiendo del tipo de operación, esto debido al mecanismo hidráulico o simplemente mecánico que permite que las aspas giren sobre su propio eje. Ofrecen una gran ventaja en cuanto al costo de operación, pero son considerablemente más costosas que las solidas.
· Sistemas de tobera. Están rodeadas por un perfil hidrodinámico, las ventajas en estas son el incremento de empuje (cerca del 40%), existen diferentes tipos de perfiles que reducen la velocidad, pero ya hay nuevos diseños que la aumentan comparadas con cualquier hélice estándar, hay toberas diseñadas para obtener el máximo desempeño hacia delante y otras para ambos (empuje hacia proa y popa). La aplicación de estos equipos está limitada a embarcaciones de baja velocidad (debajo de 14 nudos) como arrastreros, remolcadores, dragas.
· Azimutales. Esta es la opción mas avanzada cuando la maniobrabilidad es realmente valiosa para la operación del barco ya que estos sistemas giran 360° y el empuje puede direccionarse hacia cualquier lado. Existen con o sin tobera, aplican para embarcaciones comerciales que operan abajo de 14 nudos.
· Water Jets . Estos sistemas trabajan como una bomba de succión, son muy usuales en botes de alta velocidad como botes patrulla o barcos para transporte de personal, algunos sistemas corren hasta 50 nudos.
Pero una buena capacidad de maniobra de un buque depende principalmente de la velocidad mínima a la que pueden girar las hélices tanto en marcha avante como atrás, así como también los tiempos muertos que puedan existir debidos a la transmisión y ejecución de órdenes impartidas a las máquinas. En este sentido una orden de cambio de revoluciones de avante a atrás o viceversa no es inmediato y los modernos sistemas de propulsión intentan minimizarlos al mínimo. Los motores diesel disponen de la misma potencia avante que atrás, pudiéndose parar o invertir el sentido de la propulsión casi inmediatamente (rápida respuesta a las órdenes impartidas) con revoluciones normales del eje.
En los últimos años se ha ido extendiendo cada vez más el uso de hélices de paso variable. Es un sistema donde las palas de las hélices pueden ser orientadas a voluntad. Estas hélices permiten invertir el empuje que proporcionan al buque sin necesidad de cambiar el sentido de giro del eje propulsor. Las palas están instaladas de modo tal que pueden ser rotadas sobre s mismas mediante un mecanismo hidráulico especial, girando alrededor de un eje que está montado sobre el núcleo de la hélice. Este tipo de hélice constituye un eficiente medio de propulsión y da mayor facilidad y rapidez de maniobra al evitar tener que parar los ejes para dar marcha atrás.
¿En donde se encuentra ubicado?
Estos Sistemas de propulsión deben ubicarse en posiciones que asegure el rápido y fácil desplazamiento de una embarcación o gabarra de trabajo desde una posición a la próxima y que den respuestas inmediatas a situaciones de vientos, oleajes y corrientes. Además deben situar una áreas que no interfiera con la tubería que se esta tendiendo, esto quiere decir que su energía no ataque la tubería y pueda causar daños como dobleces a consecuencia de los túneles de corrientes generados por los propela o thruster.
El sistema no debe interferir con el equipo de tendido y no reducir el área disponible de cubierta en la embarcación, debe ser retráctil para operar en bajas profundidades o permitir cambios de propelas o reparaciones en su parte inferior.
La posición de los mismos debe ser orientada a que no interfiera en maniobras de atraque en muelles y ocupe grandes áreas estorbando otras embarcaciones.
El diseño debe estar orientado a la capacidad de no varar la gabarra por reparaciones como por ejemplo cambios de propelas.
¿Cómo se inicio la propulsión naval?
Es un misterio cómo y cuándo fue botada la primera embarcación, ni si lo fue desde la orilla de un río, un lago o una playa marina. Muchos estudiosos creen que embarcaciones de tipos diferentes aparecieron en todas las partes del mundo, sin relación entre sí, pero en forma más o menos simultánea. Pudiendo abarcar, el concepto de simultaneidad, lapsos de varios siglos. En el Pacífico sur, en las costas de los países nórdicos, en el Mediterráneo y en las playas africanas; en todos los parajes donde el hombre ha vivido junto a aguas navegables, ha intentado siempre construir barcos.
Las cañas y los juncos han sido durante varios milenios los principales materiales utilizados para construir embarcaciones, desde las egipcias del Nilo hasta cierto tipo de botes utilizados actualmente en los mares costeros del Perú y en el lago Titicaca.
Se puede discutir si el primer barco fue una piragua excavada en un tronco como el de la figura o un bote constituido por una armazón recubierta de cortezas de árbol o de pieles de animales. Es posible pensar que ambas formas de embarcaciones se desarrollaron al mismo tiempo, y que prevaleció una u otra según el material disponible.
Las primeras construcciones flotantes con que los hombres se lanzaron al mar eran impulsadas y movidas con los sistemas más sencillos: manos y pies, tablas planas (precursoras de los futuros remos y paletas) e incluso largas pértigas con las cuales se tomaba impulso apoyándolas sobre el fondo de las aguas tranquilas. En cuanto a los tipos de embarcaciones de una sola pieza, en otras partes del mundo se recurrió a construirlas cada vez con mayor calado, de modo que una parte considerable del buque se hallara bajo el agua, y su centro de gravedad descendiera hasta el máximo posible. Cuando se comprobó que la fuerza del viento no sólo no era peligrosa, sino que incluso podía ser aprovechada, surgieron las primeras velas: probablemente hojas de palmera o simples esteras. Piragua en la costa occidental de África.
Un antiguo documento de la historia de la navegación muestra el extraordinario grado de desarrollo alcanzado por la técnica de la construcción naval en la cuenca del Mediterráneo mil quinientos años antes de nuestra era. A la vez, da cuenta de un asombroso y dilatado viaje de exploración: se trata de un relieve en piedra existente en el templo de Karnak, y que se remonta a la reina egipcia Hatshepsut (1511-1492 a.C.). El viaje, se realizó desde el extremo norte del mar Rojo hasta la actual Etiopía o, posiblemente más lejos aún, hasta la Tierra de Punt (la actual Somalia).
La era de los grandes descubrimientos llegó a su fin antes de que los barcos de vela perdieran su primacía. Pero hacía ya tiempo que se habían realizado descubrimientos e invenciones en otros campos distintos al de la geografía, que habían de tener para la navegación mucha mayor trascendencia de lo que nadie pudo al principio sospechar.
Se descubrieron fenómenos tan importantes como la fuerza expansiva del vapor y la acción recíproca de la corriente eléctrica y del magnetismo. El hombre reconoció las posibilidades latentes en estas fuerzas y, con ayuda de su intelecto, ahora rigurosamente lógico y sistemático, erigió en menos de ciento cincuenta años un colosal imperio tecnológico.
El origen de la navegación a vapor ha sido objeto de valoraciones muy dispares que hacen muy confusa y farragosa esta importante parte de la historia marítima. Blasco de Garay, Denis Papin y Jonathan Hulls, son los tres personajes para los que se ha reclamado la primacía en la invención.
El primero que aplicó el vapor a la navegación fue el francés Claude François Jouffroy d’Abans (1751-1832). En 1776 construyó un barco provisto de una máquina de simple efecto, que accionaba una serie de remos con aletas móviles que imitaban el movimiento de las palmípedas.
En 1780 sustituyó los remos por ruedas de álabes y utilizó un barco de mayores dimensiones (46 m. de eslora), construido en Lyon y al que llamó piróscafo. Con él remontó el curso del Sena en presencia de los miembros de la academia de Lyon.
Hacia 1770 el ingeniero escocés James Watt había construido la primera máquina de vapor utilizable. Desde entonces otras mentes ingeniosas, entre ellas la del estadounidense Robert Foulton, se propusieron aplicar este mecanismo en los barcos, de manera que el movimiento giratorio, generado de un modo tan revolucionario, pudiera emplearse como fuerza de propulsión en el agua. Inmediatamente se cayó en la cuenta de que bastaba con invertir el principio de las ruedas de paletas existentes en los molinos de agua: un cigüeñal accionado por vapor haría girar dos ruedas de paletas adosadas a ambos costados del barco, con lo que éste resultaría poderosamente impulsado hacia delante.
La máquina de vapor también estuvo llamada a sustituir a la vela en los buques. Aún así la navegación a vela, dominada por la técnica americana, experimentó su apogeo a mediados del siglo XIX. Fue la época de los clippers.
En 1802, Symington probó el primer barco de ruedas, con casco de madera rentable. Se trató del buque Charlote-Dundas que se probó en el canal escocés de Forth-Clyde. La máquina iba situada en el centro y accionaba las ruedas de paletas posicionadas a babor y estribor.
En 1806 Robert Foulton marchó a América y con ayuda de Livingstone construyó el Clermont, que en 1807 enlazó New York con Albany, navegando por el río Hudson a la velocidad de 5 millas por hora. Iba dotado de una máquina de vapor de Boulton y Watt de 20 CV.
En 1817 el Caledonia equipado con dos máquinas de 32 CV, construidas por Watt, atravesó el mar del Norte y remontó el Rhin.
Las primeras pruebas con barcos de esta clase se realizaron, naturalmente, en ríos tranquilos. En 1818 se instaló en la fragata estadounidense Savannah, figura 1.6., de 30 metros de eslora, una máquina auxiliar de vapor de 90 caballos de fuerza que debía complementar el velamen. Se agregaron cabinas para 32 pasajeros y, tras largas pruebas, se emprendió la travesía del océano hasta Liverpool .
En el principio del siglo XX los navíos movidos por ruedas de paletas estaban completamente desfasados. La hélice sustituyó a la rueda debido a su gran eficiencia, reducido tamaño, reducida complejidad en el sistema de transmisión y el hecho de ser menos susceptible a dañarse, especialmente se usaba en barcos de guerra. Los proyectos iniciales se basaban en el diseño del tornillo común, de ahí su nombre. Más tarde las hélices consistían en dos palas que de perfil tenían el tamaño equivalente al de una rotación de un tornillo correspondiente en diámetro (de ahí la designación de paso de hélice). Este diseño era el más común, pero los inventores experimentaron diferentes tamaños de perfil y varias palas. El diseño de la hélice se estabilizó alrededor de 1880.
El desarrollo de la marina mercante, y junto a ella la de guerra, también ha sido espectacular en el siglo XX. El casco de acero permitirá hacer barcos cada vez más grandes, y el desarrollo del motor de combustión y la hélice permite el transporte de grandes cantidades de producto a largas distancias. La marina mercante se desarrolla enormemente, hasta los grandes superpetroleros.
Los grandes barcos aparecieron tras la utilización del motor de combustión Diesel, ya que liberó a los buques de una parte muy importante de la carga que era ocupada por el carbón. Los barcos de pasajeros actuales, y los mercantes, son capaces de atravesar el Atlántico en pocos días. En recorridos cortos se utilizan los hovercrafts, más rápidos pero de menor autonomía. Pero donde más importancia tiene la marina es en el transporte de grandes volúmenes y pesos de mercancías.
Actualmente las hélices son movidas por motores de combustión o turbinas. El acoplamiento de la hélice al motor puede ser directo o bien mediante mecanismos reductores.
Las hélices se clasifican básicamente en hélices de paso fijo y hélices de paso variable.
Como su propio nombre indica, una hélice de paso fijo es aquella cuyo paso es único y no es modificable por mecanismo alguno.
Este tipo de hélice compensa su falta de eficacia con una gran sencillez de funcionamiento. Las hélices con paso variable y reversible son hélices de tornillo en que las aspas se han montado separadamente en el cubo, cada una sobre un eje, y en las cuales el paso puede cambiarse y aún invertir, mientras la hélice está girando. El paso se cambia por medio de un mecanismo interno, que consiste esencialmente en unos actuadores hidráulicos, situados en el cubo de la hélice y que actúan sobre unas crucetas. Son mejores para los vehículos que operan en condiciones variables, como remolcadores, barcos pesqueros, transbordadores, buscaminas y lanchas de desembarco. El empleo de las hélices de paso variable elimina los mecanismos de reversa de los motores de movimiento alterno y de las turbinas de marcha atrás en los vehículos que tienen este sistema de propulsión, y son muy importantes en las instalaciones de turbinas de gas.
El requisito básico de operación para los sistemas principales de propulsión, es impulsar el vehículo con la velocidad constante necesaria, durante y a la distancia que se requiere, y tener la capacidad de maniobra adecuada. Para ello, se integra el generador de potencia, el sistema de transmisión, el propulsor y otros sistemas a bordo, con el casco del barco. La figura 1.8., muestra varias alternativas de sistemas de propulsión con hélices de paso fijo y de paso variable.
En los barcos modernos sólo los motores Diesel de baja velocidad y gran diámetro de los pistones se conectan directamente con la flecha de la hélice. Para convertir las relativamente altas de un motor económico compacto a las rpm relativamente bajas necesarias en la hélice para un alto rendimiento de la propulsión, se necesitan sistemas de transmisión mecánicos, como trenes de engranajes de reducción o eléctricos, como las transmisiones generador-motor. En los casos de turbinas de vapor, motores Diesel de media o alta velocidad, y turbinas de gas, se emplean transmisiones con reducciones de engranajes.
Las relaciones de engranaje varían de valores relativamente bajos para los motores Diesel de velocidad media, hasta aproximadamente 50:1 para turbinas compactas. Cuando el motor es unidireccional, el mecanismo de transmisión debe incluir también un mecanismo de reversa. La mayoría de las hélices tienen su eje de rotación paralelo a la dirección del movimiento, también ha habido tentativas de propulsar vehículos usando los mismos principios de las turbinas de viento de eje vertical, donde el eje de rotación es perpendicular. Hay dos tipos de sistemas de propulsión con eje vertical, localizados bajo el agua en la popa. Los discos del rotor se colocan siguiendo el flujo de la corriente del casco y tienen de 5 a 8 palas alargadas currentilíneas cerca de la periferia. Las palas se perfilan durante la rotación del disco, para producir un empuje máximo en cualquier dirección que se desee.
En el sistema Kirsten-Boeing, las palas están interconectadas por engranajes de tal forma, que cada una realiza media revolución alrededor de su eje por cada revolución del disco.
En el sistema Voith-Schneider, figura 1.9., las palas realizan una revolución completa alrededor de su propio eje por cada revolución del disco. Para transmitir la potencia desde la flecha horizontal al disco se emplea un engranaje cónico. Esto impone limitaciones a la potencia máxima que puede transmitirse; pero, aunque el propulsor es 30 o 40% menos eficiente que las hélices de tornillo, tiene ventajas de maniobrabilidad. Los propulsores de este tipo también se han usado en la proa, para ayudar en las maniobras.
Existen, además, otros sistemas de empuje entre los que destacan los siguientes: Chorros de agua. Este método consiste en un impulsor o bomba colocada dentro del casco, que toma agua del exterior, la acelera y la descarga con alta velocidad por la popa.
Es un mecanismo de reacción semejante a la hélice; sin embargo, las partes móviles se encuentran dentro del casco, lo cual es deseable para la operación en aguas de poco calado. El rendimiento total es menor que con las hélices de un diámetro igual que el del orificio del chorro, debido principalmente a las pérdidas en los tubos de entrada. Otra desventaja es la pérdida de volumen en los ductos y el impulsor, y el peligro de atascamiento con basura en el impulsor. Los chorros de agua se emplean en general en hidroplanos y vehículos de superficie.
En este sistema el impulsor rotativo está fuera del casco y tiene guías fijas adelante o atrás, y la unidad completa se encuentra dentro de un ducto o una cubierta alargada en forma de anillo. El diámetro del ducto aumenta desde la entrada hasta el impulsor, de tal forma que la velocidad disminuye y la presión aumenta. Por lo tanto el diámetro del impulsor es mayor, la carga es menor y el rendimiento es mayor. La incidencia de cavitación y ruido se retrasa. Sin embargo, las resistencias en el ducto representan una pérdida.
Toberas Kort. En este sistema la hélice de tornillo opera dentro de una tobera o anillo unido al fondo del casco. Las secciones longitudinales tienen forma aerodinámica y la longitud de la tobera es, en general, la mitad de su diámetro. A diferencia de la cubierta anular del sistema de bomba y chorro, la entrada de la tobera Kort es mucho mayor que la sección de la hélice, con lo cual el gasto de agua es mucho mayor que en hélices abiertas, y se logra mayor empuje. Debido a la aceleración del agua en el interior la tobera, la presión interna es menor y, por tanto, se presenta un empuje hacia adelante en la tobera y en el casco. La mayor ventaja se obtiene con remolcadores que comienzan a moverse desde una posición de reposo. La velocidad de giro libre es en general, menor con la tobera que sin ella. En algunos remolcadores y barcos de río, la tobera completa se encuentra pivoteada y se emplea con un mecanismo de dirección muy eficiente.
Pueden montarse dos o más hélices en una misma flecha, con lo cual se divide el factor de carga aumentada cuando el diámetro de una hélice está restringido. Las hélices que giran en la misma dirección se llaman hélices de tándem, y las que giran en direcciones opuestas, contrarrotativas. La energía de rotación de las hélices en tándem aumenta de una hélice a la siguiente. Las hélices contrarrotativas, están montadas en flechas coaxiales, que giran en sentidos contrarios, de tal forma que la hélice posterior recupera la energía de rotación de la que está adelante.
La hélice posterior es de diámetro menor para ajustarse a las líneas de corriente y tiene un paso adecuado para lograr la absorción de potencia. Estas hélices se han utilizado durante años en torpedos, para evitar la rotación del cuerpo de los mismos. Hidrodinámicamente, las ventajas de las hélices contrarrotativas son un rendimiento propulsivo mayor, mejores características de vibración y una frecuencia mayor de las aspas. Las desventajas, son, principalmente, el sistema complicado de engranajes, las flechas coaxiales y los problemas de sellado.
Cuando la parte posterior de una hélice presenta cavitación en toda su área, al aumentar las rpm no se reduce la presión en la parte posterior, pero la de la cara continúa aumentando y hace que el empuje total crezca con una relación menor que antes que empezara la cavitación. La ventaja de las hélices con cavitación total es la ausencia de erosión en la parte posterior y una vibración menor.
Aunque las características de tales hélices se han determinado por medio de pruebas y tanteos, se han utilizado bastante en lanchas motoras de carreras. El diseño de la sección de la pala debe asegurar una separación limpia del flujo en los bordes de entrada y salida, y proporcionar relaciones de empuje-resistencia de alta eficiencia. Introduciendo aire en la parte posterior de las aspas, hélices ventiladas, se logra la cavitación completa con velocidades menores.
Hélices parcialmente sumergidas. La resistencia presentada por las hélices de vehículos de alta velocidad, como lanchas planeadoras, hidroplanos y naves de efecto superficie, condujo al desarrollo de las hélices parcialmente sumergidas. Aunque todavía faltan por resolver muchos problemas de vibración y resistencia, debido a las cargas cíclicas sobre las aspas al entrar y salir del agua, se ha demostrado que los rendimientos, cuando la hélice está parcialmente sumergida, son semejantes a los de la operación con la hélice totalmente sumergida y sin cavitación. Los rendimientos de estas hélices pueden considerarse dentro de un amplio rango de posibilidades.
Motores de gasolina fuera de borda. Los motores fuera de borda de a combinan la dirección y la propulsión y son muy populares por su uso en lanchas pequeñas de recreo. Las unidades de alta potencia llegan a para motores Diesel de uso comercial.
La turbina de vapor
Cabe preguntarse por las causas que contribuyeron a que la máquina de vapor de cilindro triunfase en principio sobre la turbina, a pesar de ser ésta históricamente anterior. La explicación se encuentra en las condiciones técnicas de construcción. Una turbina de vapor exige ajustar sus diversos órganos a la décima del milímetro mientras que Watt estimaba que podría considerarse satisfecho si el ajuste entre el cilindro y el émbolo, de su máquina de vapor, llegaba a tener un juego no superior a un milímetro.
El ingeniero sueco Gustaf de Laval (1845-1913) creó como subproducto de su desnatador centrífugo, por la necesidad de encontrar un accionamiento de gran velocidad para el mismo, la turbina de vapor de acción, de un solo escalonamiento, llamada turbina de Laval. Esta turbina estuvo constituida por un disco único, cuyo diámetro fue de y que giraba a la fantástica velocidad de . El vapor proyectado sobre sus álabes por una serie de toberas fijas, alrededor de la rueda, llegaba completamente expansionado. Dada la velocidad de la turbina, su eje vibraba y fue preciso construirlo flexible, para permitir que llegase sin rotura a su velocidad crítica.
En 1884, el ingeniero inglés Charles Parsons (1854-1931) quien buscaba un motor marino apropiado, desarrolló una turbina de vapor de reacción de varios escalonamientos. La primera turbina de reacción que giraba a razón de y desarrollaba una potencia superior a , dividía la expansión del vapor en varias fases, obteniendo mayor eficacia que la máquina de vapor. En lo esencial la turbina constaba de un rotor, compuesto de una serie de discos sobre un eje común, los cuales disponían de paletas que alternaban en toda su superficie. A través de éstas escapaba el vapor a la vez que movía el disco. El vapor empujaba el disco siguiente, como resultado de su impacto sobre las paletas de un anillo que se ajustaba al disco. De esta forma los rotores se movían alternativamente por acción y reacción. El éxito de la combinación de los dos principios se evidenció en 1891, cuando Parsons construyó una turbina de accionamiento de un generador eléctrico.
Con ocasión de la revista naval británica realizada en Spithead en 1897, un barco de 30m de eslora cruzó entre los buques de guerra y sus asombradas tripulaciones, levantando tanta espuma y a una velocidad tan increíble (35 nudos ) que los entendidos comprendieron inmediatamente la trascendencia del acontecimiento. Era el Turbinia de la figura 1.10., barco experimental impulsado, con su nombre revela, por una turbina de vapor.
El ingeniero de minas francés Râteau (1863-1930), centró sus estudios en los fluidos, considerando a estos como fuerzas motrices, y sobre las máquinas en las que actúan, a las que denominó turbomáquinas.
En la exposición universal de 1900 en París, presentó una turbina de vapor de varias etapas, permitiendo, de esta manera, una disminución de la velocidad de la turbina sin pérdida de potencia.
También por entonces el estadounidense Curtis, que en 1895 obtuvo una patente de una turbina que combinaba ruedas de álabes fijos y móviles, proyectó construir una turbina de 5000w. En la turbina de Curtis, el vapor, una vez accionados los álabes móviles, fluía sobre unas paletas fijas llamadas directrices en las que modificaba su dirección antes de incidir sobre la siguiente corona de álabes móviles.
Entre 1903 y 1905 el transbordador Queen y los buques Victorian, Virginian y Cameria, fueron equipados con turbinas de vapor de 7.500, 12.000 y 21.000 C.V que abrieron la generación de los buques impulsados por turbinas.
El motor alternativo de combustión interna
En los motores de pistón de vacío la carrera motriz del émbolo se debía a la disminución de la presión de la carga por debajo de la presión atmosférica como consecuencia de su enfriamiento.
En 1854, los italianos E. Bassanti y C.F. Matteucci, solicitaron patente en Inglaterra sobre el método de Obtención de potencia motriz mediante explosión de gases. Se basaron en un pistón de vacío y cremallera que engranaba en el descenso. El motor estaba compuesto de dos pistones y dos cilindros en paralelo en tiempos opuestos. Se alimentaba de hidrógeno produciéndose el encendido por chispa, que daba lugar a la proyección del pistón hacia arriba. La gravedad y la depresión causada por la expansión provocaban el descenso del pistón.
La muerte de Bassanti interrumpió el proyecto de fabricación. Su idea consiguieron explotarla Nickolaus A. Otto y E. Langen, quienes introdujeron un volante de inercia, para ejecutar la carrera ascendente e introducir una nueva carga. Este motor proporcionaba 1/2CV a 80 rpm; se llegaron a fabricar unos 5000 y dominó el mercado hasta la aparición del motor Otto de cuatro tiempos
El 16 de enero de 1862, Alphonse Beau de Rochas (1815-1893), ingeniero francés, registró una patente sobre el ciclo que regulaba las condiciones de la transformación en energía mecánica de la energía térmica, obtenida de la inflamación de una mezcla aire-gas en cámara cerrada.
En 1876, Nickolaus Otto (1832-1891) construyó el primer motor de gran velocidad de régimen que funcionó según el ciclo de Rochas. El llamado Silent Otto se construyó en la Gasmotorenfabrik Deutz AG de Köln, e iba provisto de un regulador centrífugo para limitar la velocidad máxima y una distribución por válvulas laterales. Constaba de un solo cilindro montado horizontalmente con un diámetro de 161mm y una carrera de 300mm La presión al fin de la compresión era de 2.36atm, la potencia efectiva de 3CV, el régimen de velocidad 185 rpm y consumía gas (0´95m3N/CV h).
En la memoria “Teoría y construcción de un motor térmico racional, destinado a sustituir a la máquina de vapor y a los demás motores conocidos actualmente (1893)”, Diesel concentró en noventa y seis páginas sus estudios y trabajos. Patentó su primer motor en 1892, pero cuando trató de echarlo a andar, explotó.
En 1897, fabricó un motor práctico de un cilindro capaz de desarrollar 25 CV . En este motor, el combustible experimentaba un autoencendido, prescindiendo de instalación eléctrica y no necesitando carburador.
Era un motor de cuatro tiempos. En el primer tiempo, de desplazamiento descendente del émbolo, sólo absorbía aire fresco. En el segundo, ascendente del émbolo, comprimía dicho aire hasta temperaturas comprendidas entre 700 y 900 ºC . Se inyectaba entonces el combustible altamente inflamable que se encendía inmediatamente, empujando el émbolo hacia abajo, en su tercer tiempo, y realizándose un trabajo motriz. En el cuarto tiempo, el émbolo ascendía expulsando los gases.
El primer motor comercial Diesel entró en servicio un año después en San Luis (Missouri). Se trató de un motor de dos cilindros y 60 CV.
La idea de realizar el proceso de Beau de Rochas en dos tiempos permite aumentar la potencia por cilindrada; en la consecución de dicho objetivo cabe citar los trabajos de Robson, Clerk, Benz y Day.
El monje escocés Robert Stirling (1790-1878), construyó en 1816, un motor de aire caliente con ignición externa, que funcionó muy bien. Su diseño sirvió a diversos constructores de motores a partir de 1818 [33].
El funcionamiento del motor diesel era tan perfecto que, pasados unos cuantos años, pudo experimentarse también en barcos. En 1910 se instaló en el buque cisterna Vulkanus, que medía 60m de eslora, un motor diesel con seis cilindros que desarrollaba 50 hp . Se trataba de la primera prueba de un motor de este tipo aplicado a la navegación; no obstante cuando el barco fue desguazado en 1931, después de veinte años de servicio en los trópicos, el motor estaba indudablemente viejo, pero funcionaba sin dificultad.
La turbina de gas
La turbina de gas con respecto a los motores de combustión interna ha sido lo que las turbinas de vapor con respecto a las máquinas alternativas de vapor.
Ya Leonardo da Vinci realizó diseños con este motor para diversas aplicaciones y, en 1791, el inglés John Barber ideó una turbina para ser accionada por los productos de la combustión, que no llegaría a realizar, aunque sí a patentar.
Fue el constructor británico Whitte, el que en 1928 patenta y en 1937 prueba el primer turborreactor de aviación, que fue impulsado por reacción. Estaba formado por compresor, cámara de combustión en la que quemaba keroseno, turbina de accionamiento del compresor y tobera de salida de los gases.
Una turbina de gas más evolucionada, desarrollada inicialmente por Rolls Royce para aviones comerciales, fue adaptada al principio de los años setenta del siglo pasado para la marina de guerra británica. En ella, el compresor está dividido en dos partes. La de BP, a la izquierda, con nueve etapas, está movida por la rueda de MP de la turbina. Y la de AP, de seis etapas, lo está por la rueda de AP de la turbina. La turbina o rueda de BP, separada de las otras, mueve la hélice.
Una turbina de General Electric, de 27.200, fue ensayada a partir de 1967 en uno de los ejes del transporte estadounidense Adm. Wm W Callaghan, que fue, probablemente, el primer barco mercante construido para ser propulsado por esta clase de máquina. Tiene ésta dos ejes, con un compresor de 16 etapas con paletas fijas orientables y una presión de descarga de 17 bar. Como la temperatura máxima es de 1.180 ºC, las paletas de la turbina de AP están refrigeradas. Su consumos es de 175g/CV/ h. Pero lo interesante en el presente contexto es que, habiendo tenido resultados muy satisfactorios, fue escogida, ya en 1977, por la marina norteamericana para más de 150 barcos de guerra.
La primera turbina de gas fue instalada en un barco que llevaba motores. Era un barco pequeño. En los grandes, que estaban propulsados por vapor, se añadió a esa planta la turbina de gas para navegar a mayor velocidad. Para lo que es particularmente apropiada, por ponerse muy rápidamente en servicio (90 s, desde la máquina parada y fría hasta estar a plena potencia, en la LM 2500) y ser fácilmente manejable a distancia.
Una turbina de vapor, que en un momento dado puede reforzarse con una de gas, es una instalación COSAG; y si hay un motor Diesel para marcha de crucero, pero sólo la turbina de gas está funcionando a Toda Fuerza, se trata de una CODOG.
A pesar de que en relativamente poco tiempo su consumo específico había disminuido a poco más de un tercio del que tenían las primeras turbinas, seguían quemando más combustible que los motores Diesel.
La propulsión eléctrica
La propulsión eléctrica es un área emergente a la que concurren diferentes áreas de conocimiento. Las soluciones más satisfactorias para buques propulsados eléctricamente se hallarán en escenarios en los que la arquitectura naval, la ingeniería hidrodinámica y de propulsión y, por último, la ingeniería eléctrica, cooperen bajo consideraciones constructivas, operacionales y económicas. El diseño y compromisos optimizados habrán de ser alcanzados con un lenguaje conceptual común y con un entendimiento mutuo de las distintas materias.
El concepto de propulsión eléctrica no es nuevo, ya que la idea se originó hace más de 100 años. Sin embargo, con la posibilidad de controlar los motores eléctricos con velocidad variable dentro de un amplio rango de potencias, todo ello con compacidad, fiabilidad y costo competitivo, el uso de la propulsión eléctrica se extendió a nuevas áreas de aplicación durante los años 80 y 90 del siglo XX.
Actualmente, la propulsión eléctrica es aplicada, principalmente, en los siguientes tipos de buque: cruceros, ferrys, cableros, instaladores de tubos submarinos, buques perforadores con DP, buques de asistencia de instalaciones de producción flotantes amarradas, petroleros lanzadera, rompehielos, buques de suministro y buques de guerra.
Posteriormente a las aplicaciones experimentales de la propulsión eléctrica alimentada por batería a finales del siglo IXX que tuvieron lugar en Rusia y Alemania, la primera generación de propulsión eléctrica fue puesta en uso en 1920, como resultado de la competencia existente al objeto de reducir el tiempo requerido por los buques de pasajeros para cruzar el Atlántico. El S/SNormandie era uno de los más renombrados. Los turbogeneradores de vapor proporcionaban la energía eléctrica necesaria para alimentar los motores eléctricos síncronos de 29 MW en cada uno de los cuatro ejes de hélice.
Con la introducción de motores diesel más eficientes y favorables económicamente a mediados del siglo XX, la tecnología de las turbinas de vapor y la propulsión eléctrica desaparecieron en gran medida de los buques de la marina mercante hasta 1980.
El desarrollo de los variadores eléctricos de velocidad, inicialmente con el rectificador AC/DC (usando tiristores o Silicon Controlled Rectifier-SCR) en 1970 y los convertidores AC/AC a inicios de 1980, posibilitó el desarrollo de la planta eléctrica basada en el sistema de propulsión eléctrica, el cual es típico para la propulsión eléctrica de segunda generación.
La propulsión POD fue introducida a principios de los 90 el siglo pasado, cuando el motor eléctrico es instalado directamente en el eje de una hélice de paso fijo, en un POD sumergido y con giro azimutal. Mientras que este concepto fue originalmente desarrollado para realzar el funcionamiento de los rompehielos, rápidamente se demostró que proporcionaba beneficios en la maniobrabilidad y en la eficiencia hidrodinámica. Después de la primera aplicación en un buque crucero, el M/S Elation, las ventajas fueron tan convincentes que la propulsión POD casi se convirtió en un elemento estándar en los nuevos buques cruceros.
Los buques atómicos
En 1938 el alemán Otto Hahn logró por vez primera, mediante un bombardeo de neutrones, escindir el núcleo del átomo de uranio y liberar la energía atómica. Se abría así una nueva etapa que terminaría revolucionando, por tercera vez (la turbina vapor y el motor de combustión interna son las otras dos) en menos de medio siglo, el sistema de propulsión de los barcos. Desde entonces continúa en aumento el número de reactores en los que se obtiene, para ser utilizada con fines pacíficos, la misma energía que desarrolla la bomba atómica.
Pero el futuro continúa siendo una incógnita, especialmente porque la propulsión atómica sólo es rentable en barcos de grandes dimensiones, que todavía no necesita la marina mercante. Incluso los mayores superpetroleros hasta ahora construidos, con más de 500.000ton de capacidad de carga, necesitan menos de 50.000 HP. Precisamente a partir de este límite de eficiencia el reactor comienza a desarrollar todas sus posibilidades.
Los primeros y más satisfactorios de los esfuerzos para desarrollar la potencia nuclear en la propulsión de barcos fueron realizados por la AEC y por la armada de Estados Unidos. La armada de Estados Unidos botó el USN Nautilus en el año 1954, seguido por alrededor de otros cien submarinos de operación nuclear y por cuatro barcos de operación de superficie. También Inglaterra, Rusia y Francia, han puesto en operación submarinos nucleares.
¿COMO FUNCIONA EL SISTEMA DE PROPULSION?
Maquina primarias
Toda máquina necesita una energía para su funcionamiento y esta energía se obtiene de los combustibles, combustible que puede ser de origen fósil o nucleares y ha de disponer de un medio de transformar la energía calorífica del combustible en energía mecánica.
Si el combustible es fósil, como ocurre en la inmensa mayoría de las aplicaciones, dicha transformación puede hacerse de una de las formas siguientes:
a) Quemándolo en un recipiente –la caldera- en donde la energía calorífica se transfiere al agua que contiene para generar vapor, el cual, a su vez, actuando sobre la máquina adecuada, una turbina de vapor, produce el trabajo mecánico para accionar el propulsor.
b) Quemándolo directamente en el interior de la propia máquina que desarrolla el trabajo mecánico, caso de los motores, y de ahí su nombre de máquinas de combustión interna.
c) Quemándolo directamente en una zona o cuerpo de una máquina y aprovechando el flujo de gases para mover una turbina –que forma parte de la misma máquina- y es la que efectúa el trabajo mecánico. Es el caso de las turbinas de de gas.
¿Cuáles son los tipos de propulsión?
Tipos de propulsión
De la combinación de los elementos señalados en el punto anterior podemos ya esquematizar los tipos de instalación más usuales que son:
Propulsión a vapor (combustible fósil)
- Generación del vapor : Calderas de tubos de agua, con o sin circulación forzada o con hogar presurizado.
- Máquina propulsora: Turbinas de vapor Propulsión Turbo-eléctrica
Propulsión por máquinas de combustión
Interna:
- Motores diésel de dos o cuatro tiempos:
Lentos directamente acoplados
Semirrápidos y rápidos engranados
Disposición diésel eléctrica
Ocasionalmente se utilizan también motores de explosión como por ejemplo en embarcaciones deportivas.
Propulsión por Turbinas de Gas:
Solas con reductor de engranajes
Disposición turbinas de gas-eléctrica
Propulsión nuclear:
- Generación del vapor:
Reactor atómico PWR
Máquina propulsora:
Turbinas de vapor de características especiales
Sistemas básicos utilizado por maquina primarias:
La utilización de las máquinas primarias en los distintos tipos de instalación que acabamos de describir nos lleva a la necesidad de conocer los sistemas básicos que utilizan combustibles fósiles y son:
Propulsión a vapor
Propulsión por motores
Propulsión por turbinas de gas
¿Qué nos brinda cada sistema?
Propulsión a vapor
Si prescindimos de la propulsión a remo y a vela, que fueron indudablemente las primeras formas mediante las cuales se consiguió el desplazamiento de un cuerpo en el agua, la propulsión a vapor fue, cronológicamente, la primera en aparecer y ha sido el sistema por antonomasia durante muchos años y aún perdura para determinadas aplicaciones aunque está siendo ampliamente superada por los motores diésel y las turbinas de gas, especialmente desde que la crisis del petróleo del inicio de los años 70 hizo que el consumo de combustible pasase a ser un elemento capital de los costes de explotación.
La forma más sencilla de ver el sistema es sobre un diagrama de una instalación de vapor, ir mostrando y describiendo someramente cada uno de los elementos que la componen y la relación funcional entre ellos. Tendremos así una visión de conjunto que nos permitirá obtener una idea concreta de cómo funciona y los elementos que se necesitan para ello y que forman lo que se denomina “cadena del vapor”.
La caldera contiene agua que, por medio del calor aportado por la combustión del fuel en los mecheros, se vaporiza, el vapor asciende por los tubos y se recoge en la parte superior o colector de vapor de donde vuelve a entrar en los haces sobrecalentadores para sufrir un aporte de calor a presión constante, aumentando así su entalpía, es decir, su capacidad de producir trabajo.
El vapor sobrecalentado sale a trabajar en las turbinas, primero en la de alta y luego en la de baja donde se expansiona sucesivamente aumentando su volumen y produciendo trabajo que se traduce en el giro del eje propulsor a través del engranaje reductor. El vapor, fuertemente expansionado, se recoge en un recipiente donde reina el vacío, el condensador principal, en el cual en virtud de los condicionantes reinantes y de la refrigeración que sufre por el agua de mar que circula a su través, este vapor se condensa y transforma en agua. En el condensador se hace la adición del agua de alimentación necesaria para reponer las pérdidas que siempre hay en el circuito y el condensado (agua condensada) es recogida por la bomba de condensado y pasa al “tanque desaireador” que, como su nombre indica, tiene por misión librar lo que va a ser agua de alimentación de la caldera del aire (oxígeno) que pueda llevar disuelto y calentarla. El agua de alimentación la recogen las bombas booster y las bombas de alimentación principal, que le dan la presión necesaria para su introducción a la caldera donde entra a una presión ligeramente superior a lo que reina en ella y a una temperatura inferior, pero próxima a la del agua del interior para que el ciclo real se aproxima lo más posible al ciclo teórico. El agua, una vez en la caldera, inicia de nuevo el ciclo ya descrito.
Propulsión por motores
El motor de combustión interna es un elemento tan familiar en nuestra vida de hoy que naturalmente no voy a describir cómo funciona, aunque en el coloquio, si alguien lo desea, podemos tratar ampliamente este tema. Diré solamente que es el sistema de propulsión preponderante en el día de hoy ya que, su extraordinaria economía de funcionamiento, con consumos del orden de los 135 gramos /CV. H., lo convierte en la opción más atractivapara los buques mercantes.
Incluso en las Marinas de Guerra, donde por el carácter alternativo del motor –y por lo tanto generando más ruido y vibraciones que la propulsión por turbinas de vapor- no era aceptado en ciertos tipos de barcos, como por ejemplo, aquellos dedicados a la lucha antisubmarina, están siendo ya, no sólo considerados sino utilizados, disponiendo montajes antivibratorios y anti-ruidos especiales, tal como puede ser el encapsulado.
En buques mercantes la disposición usual es que el motor vaya directamente acoplado al eje y en casos donde sea aconsejable se pueda instalar uno o varios motores acoplados al eje propulsor mediante el correspondiente engranaje. En buques de guerra no de combate se utiliza ya profusamente el motor diésel y en buques de línea la forma más usual de encontrarlo a bordo es formando parte de las llamadas “Instalaciones Mixtas” a las que dedicaremos un comentario posterior.
El motor de explosión no tiene casi aplicación en propulsión de buques, salvo, naturalmente, en embarcaciones de recreo y deportivas, como antes señalé.
PROPULSION POR TURBINAS DE GAS
Este es el más moderno sistema de propulsión que existe de los que usan combustible fósil cuya ventaja radica en la insuperable relación peso-potencia que desarrollan y puede decirse que son el elemento primordial de propulsión de los buques de combate, habiendo sido adoptado por casi todas las Marinas de Guerra del mundo.
En el campo mercante ha habido también casos donde se instaló después de un auténtico proceso racional de selección, pero la crisis del petróleo de inicios de los 70 frenó su utilización en beneficio del motor diésel, ya que, si bien los consumos de las turbinas de gas modernas son aceptables, del orden de los 180 gramos/CV.h. no pueden competir con los 135 gramos/CV.h. del diésel a la hora de conseguir una explotación rentable, especialmente en momentos de crisis como los actuales, donde hay que arañar costes allí donde se pueda.
Dado que este tipo de máquina es mucho menos conocida, vamos a hacer una descripción de sus principios de funcionamiento para ver a continuación su forma de utilización.
PROPULSION NUCLEAR
Este tipo de propulsión tan especial y tantas veces atacado, yo creo que injustamente, pues si bien tiene riesgos inherentes a su funcionamiento, la verdad es que son bien conocidos y actualmente se toman tal cantidad de precauciones para evitarlos que la posibilidad de que se produzcan es realmente remota. Otra cosa es que algún momento algunas naciones utilizadoras del sistema hubiesen corrido riesgos innecesarios, en orden a acortar plazos de disponibilidad, tanto en planteamiento como en control de calidad, construcción, operación, etc. Y que condujeron a desastres en su aplicación naval, que, insisto, con la tecnología actual y con la metodología de seguridad existente, la posibilidad de que se produzca un accidente catastrófico es realmente mínima.
La propulsión nuclear es, básicamente una propulsión a vapor y además a vapor y de no muy elevadas características, ya que, el propio proceso nuclear no permite tener temperaturas muy elevadas del vapor obtenido, como es siempre de desear para aumentar el rendimiento del ciclo.
La diferencia con el sistema de vapor convencional es que en el nuclear la caldera se sustituye por un reactor, en el cual se verifica el proceso de fisión controlada que da lugar a un desprendimiento de calor, que es el que se utiliza para vaporizar el agua. Este vapor es el que, en la forma habitual, desarrolla trabajo en una turbina.
Centrándonos en el reactor nuclear, auténtico corazón del sistema, diremos que el fundamento del mismo es el fenómeno de la fisión nuclear. Existen ciertos elementos químicos pesados cuyos núcleos, al tener una cierta inestabilidad, son susceptibles, mediante el bombardeo de neutrones de baja energía de escindirse en dos núcleos aproximadamente iguales, más ligeros, con producción de nuevos neutrones y un defecto de masa resultante. Este defecto de masa aparece en forma de energía calorífica, en virtud de la conocida Ley de Einstein E= m.c2, en la cual E es la energía, m la masa y c la velocidad de la luz.
La importancia del proceso reside en que, si el número de neutrones que aparece en cada fisión es suficiente, la reacción puede ser automantenida, ya que estos neutrones pueden usarse para mantener indefinidamente el proceso de fisión mientras haya material fisionable.
En determinaciones experimentales se comprobó el promedio de neutrones emitidos por la fisión de determinados materiales radioactivos, obteniendo el siguiente resultado :
Plutonio 239 - 2,91 neutrones/fisión
Uranio 235 - 2,47 neutrones/fisión
Estos neutrones aparecen con energías elevadas del orden de 1 ó 2 Mev. Como ya hemos dicho que sólo son susceptibles de producir fisión los neutrones de baja energía, será necesario “moderar” a los neutrones emitidos de forma que se rebaje su energía hasta niveles lentos o térmicos –con energías alrededor de 0,1 ev-. Esto se consigue mediante choques de los neutrones rápidos con el elemento moderador, que es pieza esencial de un reactor.
Por otra parte el 99% de los neutrones producidos en la fisión se emiten en un muy corto espacio de tiempo, son los llamados neutrones “instantáneos” del orden de 10 elevado a menos 14 segundos, lo cual haría prácticamente imposible el control del reactor, de no darse la circunstancia de que el 0,75% de los restantes se emitan un tiempo considerable después de la fisión. Son los neutrones “retardados” que, al hacer aumentar el llamado “período del reactor” hacen posible el control físico del proceso de fisión y por lo tanto la viabilidad práctica del mismo.
Hemos dicho antes que en cada fisión se desprende una cierta cantidad de energía que, centrándonos en el combustible nuclear habitual, el Uranio 235, es del orden de 200 Mev por fisión. La energía obtenida en el reactor dependerá, por lo tanto, el número de fisiones que se realicen que son a su vez función del número de neutrones susceptibles de producir fisión. La potencia del reactor depende pues de la densidad neutrónica y es ésta la que hay que controlar para obtener los distintos niveles de potencia deseada.
Dado que para que el proceso de fisión se mantenga es necesario que el número de neutrones útiles permanezca estable, es oportuno definir el “factor de multiplicación del reactor” que es la relación del número de neutrones de una generación al existente en la generación inmediatamente anterior.
Si este factor K es igual a 1 la reacción es posible y se mantiene. Si es menor que K, la reacción en cadena se extingue y si es mayor que 1 se mantiene en forma creciente. Si el valor es 1 el reactor es “crítico”; “supercrítico” si es mayor que 1 y “subcrítico” si es inferior a la unidad.
En el caso del Uranio 235, puesto que en cada fisión se producen 2,5 neutrones como promedio, al menos uno de ellos ha de ser capaz de producir nueva fisión si la reacción ha de mantenerse. Es decir, el número de neutrones que se pierde por todos los conceptos : capturados por otros núcleos, escapados del reactor, captura por productos de fisión, etc., debe de permitir que quede disponible un número de neutrones tal que, multiplicados por 2,5 (media por fisión) den lugar al mismo número de neutrones que entraron en juego en la reacción inmediatamente precedente.
El control del proceso se hace por medio de las llamadas “barras de control” material de gran capacidad de absorción de neutrones, con el cual, introduciéndole más o menos en el interior de las barras de combustible nos permite obtener el nivel de potencia deseando haciendo crítico el reactor a ese nivel. Las barras de control van dotadas de un dispositivo que permite su introducción rápida de forma que, en caso de accidente grave (scram) se detenga de inmediato el funcionamiento del reactor.
El agua que refrigera el núcleo del reactor y que es la que se utiliza para retirar el calor producido constituye el circuito primario. Esta agua está contaminada y por lo tanto hace falta disponer un circuito secundario limpio que intercambie calor con el primario y produzca el vapor que va a trabajar en las turbinas. Este intercambio se verifica en una especie de caldera que es en realidad un intercambiador de calor auténtico.
La disposición completa de la instalación, que por lo demás es un sistema de vapor normal, queda perfectamente ilustrada en la figura de la instalación del Savannah que fue la primera experiencia que se hizo.
Cabe decir por último que, aunque hay varios tipos de reactores, el que se utiliza a bordo de los barcos es el de “agua a presión” o PWR (Presurized Water Reactor), en el cual el núcleo se mantiene a presión, para que el agua no hierva en su interior.
En lo que se refiere a la utilización práctica de la propulsión nuclear está circunscrita prácticamente a las Marinas de Guerra de las naciones más avanzadas y sobre todo es la solución ideal para submarinos balísticos a los que permite un tiempo de operación sólo limitado por la resistencia de las dotaciones con capacidad de permanecer sumergido sin limitación alguna. Es por lo tanto el sistema de elección para submarinos y también de grandes ventajas para portaviones.
INSTALACIONES MIXTAS
Después de haber reseñado y estudiado los sistemas básicos y que en la mayor parte de las aplicaciones se instalan solos, lo que significa que el barco va propulsado por vapor, por motores, por turbinas de gas, o por un sistema nuclear sin más, pero hay ocasiones, especialmente en buques de guerra donde resultan conveniente disponer y operar lo que se denomina una instalación mixta.
Una instalación se considera mixta, en el sentido más amplio de la palabra cuando utiliza varias máquinas sean o no del mismo tipo y sean o no de las mismas características para dar las distintas velocidades.
En esta definición quedan pues incluidas aquellas instalaciones donde por ejemplo se utilizan dos motores engranados ya que puede fraccionarse la potencia entregada al eje de forma que sea la de un motor solo o la de los dos trabajando conjuntamente.
En un sentido más restringido y donde el concepto de instalación mixta tiene auténtico significado es en los buques de guerra. En un buque mercante se opera normalmente durante toda la navegación a velocidad uniforme, que se mantiene hasta rendir viaje. En cambio en los buques de guerra es tal la diferencia de situaciones en que puede encontrarse, que es en ellos donde este tipo de instalaciones tiene aplicación específica y racionaliza la utilización de la maquinaria.
INSTALACIONES MIXTAS MAS USUALES
COSAG COMBINACIÓN VAPOR Y TURBINA DE GAS
CODAG COMBINACIÓN DIESEL Y TURBINA DE GAS
CODOG COMBINACIÓN DIESEL O TURBINA DE GAS
COGAG COMBINACIÓN TURBINA DE GAS Y TURBINA DE GAS
COGOG COMBINACIÓN TURBINA DE GAS O TURBINA DE GAS
CODAD COMBINCIÓN DIESEL Y DIESEL
CODLAG COMBINACIÓN DIESEL ELECTRICA Y TURBINA DE GAS
¿Cada cuanto se le da mantenimiento?
Pero si las prestaciones conseguidas son muy inferiores a las que en teoría debía conseguir, piense también en sustituirla. Aproveche para elegir una de acero inox si su bolsillo se lo permite.
Una hélice bien escogida debe permitir alcanzar el régimen de revoluciones a máximo de gases (WOP) en la zona de la curva en donde el motor entrega el máximo de potencia. El paso de una hélice y las revoluciones están inversamente relacionadas: Al incrementar el paso se reducen las revoluciones que el motor es capaz de alcanzar. Podemos tomar como referencia que un cambio de un grado en el paso de las palas modificará unas 200 rpm el régimen del motor. Por tanto si su motor no es capaz de alcanzar a tope de gases (WOP) las revoluciones a las que el motor entrega su máxima potencia, piense en reducir el paso de la hélice en tantos grados como sean necesarios.
Por ejemplo, su motor intraborda ofrece el par máximo a 2800 rpm, pero con la palanca a fondo, el motor solo alcanza las 2200 rpm (suponiendo que no es un problema de mantenimiento de filtros o mal estado del motor) entonces deberíamos cambiar la hélice por una de 3 grados menos de paso.
En vez de ajustar el ángulo de palas es posible jugar con el diámetro de la hélice. Si tenemos que aumentar el ángulo, podríamos aumentar el diámetro de la hélice dejando el mismo paso, y por el contrario, en vez de disminuir el ángulo, podríamos bajar el diámetro.
¿Cómo se mueve un buque?
Todos los grandes buques se impulsan sobre las aguas gracias al movimiento, en su parte posterior o popa, de las hélices, siendo dos normalmente las que se utilizan en los barcos de cruceros. Las hélices son como tornillos de rosca que giran continuamente en el mar, expulsando el agua a través de sus palas inclinadas. La hélice es pus el elemento propulsor típico de los buques. Su funcionamiento se basa en el fenómeno físico de la sustentación, donde el movimiento de una pala de la hélice en un fluido, debido a la acción del motor, genera un empuje en la pala que puede utilizarse para producir el movimiento de avance del barco.
En los modernos buques de crucero, las hélices pueden tener un diametro de entre 4 y 6 metros, girando lentamente entre 100 y 150 revoluciones por minuto. Se necesita una potencia de unos 30.000 caballos para mover un gran buque de cruceros, utilizándose motores diesel para generar ese trabajo.
La hélice
La función primaria de cualquier motor marino o motor de planta es convertir la energía química de un combustible en trabajo útil y usar ese trabajo en la propulsión del barco. Una unidad de propulsión consta de la maquinaria, equipo, y mandos que pueden ser mecánicos, eléctricos, o hidráulicos conectados a un eje de propulsión.
Una embarcación se mueve por el agua propulsada por elementos, tales como ruedas de paletas o hélices. Estos elementos imparten velocidad y movimiento de la embarcación a una columna de agua en la dirección opuesta a la dirección en la que se desea mover la embarcación. Una fuerza, llamada fuerza de reacción (porque reacciona a la fuerza de la columna de agua) es desarrollada contra el elemento de velocidad-impartida. Esta fuerza, también llamada empuje, se transmite al barco y hace que la embarcación se mueva a través del agua.
La hélice marina es el elemento de propulsión usado en casi todas las embarcaciones navales. El empuje desarrollado en la hélice se transmite a la estructura del barco por el eje principal por la presión del empuje desarrollado . El eje principal se extiende del eje del engrane de reducción principal a la reducción de la hélice. Se apoya en alineación por los cojinetes de suspensión, los cojinetes de retención a popa y los cojinetes de apoyo. El empuje, actuando en el eje de propulsión como un resultado del efecto del empuje de la hélice, se transmite a la estructura de la embarcación por el buje de empuje principal. En la mayoría de las embarcaciones, se localiza al final del eje principal dentro de la caja de reducción principal. En algunos grande barcos, sin embargo, el buje del eje principal se localiza más lejos a popa en un espacio de maquinaria o en un claro del eje.
El engrane de la reducción principal conecta al movedor primario (motor) al eje. La función del reductor principal es reducir las altas revoluciones del motor y dejar que la hélice opere a una velocidad más baja. En esta manera ambos el motor y el eje de la hélice giran a su velocidad más eficiente.
Tipos de Hélices
De los tipos acertados de dispositivos propulsores actualmente en uso, se puede agrupar en cuatro categorías distintas.
1) HELICES
a) Hélice de paso fijo.
La mas común debido a su relativo “bajo costo” es la hélice de paso fijo, estas hélices también se conocen como de “paso constante”, esto quiere decir que el paso en toda la superficie del aspa (excepto los ángulos de aspa) no cambia, son usadas en la mayoría de las embarcaciones comerciales como remolcadores, arrastreros, pesqueros, etc.
b) Hélice de paso variable
Como se mencionaba, la mayoría de las hélices tienen un paso constante, pero hay algunas aplicaciones especiales (grandes barcos o embarcaciones de velocidad) donde la necesidad de obtener la máxima eficiencia posible es imperativa. En estas hélices, el paso puede variar en cada radio (dependiendo del diseño), pero es mas común encontrarse aquellas donde usualmente se reduce el paso cerca de las puntas para reducir la presión de las aspas y la posibilidad de cavitación.
c) Hélice de paso controlable
Estas hélices permiten al operador ajustar el paso a voluntad dependiendo del tipo de operación, esto debido al mecanismo hidráulico o simplemente mecánico que permite que las aspas giren sobre su propio eje. Ofrecen una gran ventaja en cuanto al costo de operación, pero son considerablemente más costosas que las solidas.
d) Hélice para toberas
Están rodeadas por un perfil hidrodinámico, las ventajas en estas son el incremento de empuje (cerca del 40%), existen diferentes tipos de perfiles que reducen la velocidad, pero ya hay nuevos diseños que la aumentan comparadas con cualquier hélice standard, hay toberas diseñadas para obtener el máximo desempeño hacia delante y otras para ambos (empuje hacia proa y popa). La aplicación de estos equipos esta limitada a embarcaciones de baja velocidad (debajo de 14 nudos) como arrastreros, remolcadores, dragas.
2) Rueda tipo paleta , montadas en popa, como las montadas lateralmente
3) Hélices tipo jet
water Jets .- Estos sistemas trabajan como una bomba de succión, son muy usuales en botes de alta velocidad como botes patrulla o barcos para transporte de personal, algunos sistemas corren hasta 50 nudos.
a) Hélices tipo jet con tobera sumergida
b) Hélice tipo jet con tobera de superficie
4) Hélices verticales (cicloidales)
a) Hélice tipo kirsten-boeing
b) Hélice tipo voith-schneider
El Número de Palas de la Hélice
Es importante el número de palas, a más palas mayor superficie capaz de distribuir la potencia del motor entre las distintas palas y por tanto tener una superficie suficiente para desplazar todo el volumen de agua que la potencia del motor permita. Por mucho que se tenga un motor muy potente no se podría aprovecharlo ya que las ruedas patinarían y no se conseguiría acelerar el vehículo todo lo que el motor permitiría. Palas demasiado pequeñas causan ‘cargas’ muy altas, lo que significa que la hélice no es capaz de absorber toda la potencia transferida por el motor. El resultado es lo que se conoce como cavitación, vibraciones y en algunos casos extremos ‘picaduras’ en las palas.
La Rotación de la Hélice
Así como la palabra sugiere, la rotación determina la dirección del giro de una hélice en torno al eje . La rotación se determina mirando a la hélice desde la parte trasera del barco. A mano derecha si la hélice gira en sentido horario, por lo tanto, se desplazan hacia el lado derecho. Contrariamente, a mano izquierda si la hélice gira en sentido contrario a las agujas del reloj mientras observa la hélice de la parte trasera del buque. El cambio de las rotaciones en instalaciones individuales, dobles, triples pueden afectar el rendimiento de las embarcaciones. Normalmente viendo el barco desde la parte de atrás (popa) las hélices de una sola montura giran en sentido a las agujas del reloj , aunque esto nos propicia a que el barco siempre tienda a caer de proa,
En las monturas dobles una hélice gira hacia la derecha y la otra hacia la izquierda esta gira contra las agujas del reloj. a este tipo de sentido de giro se utiliza en monturas dobles CONTRAROTACION, con el fin de contrastar el empuje de cada hélice .Esto se traduce en una mejor línea recta de navegación y control del timón a alta velocidad.
Muchas embarcaciones con motores simples tienen motores girando en el mismo sentido horario es decir diestro. Dos hélices girando en el mismo sentido en un barco crea una fuerza de dirección hacia un sentido. En otras palabras, dos hélices diestras tiran la popa hacia la derecha y la proa hacia la izquierda. Para contrarrestar este rotación (sentido contrario) en monturas con dos motores se utiliza uno de ellos con giro inverso a las agujas del reloj.
Conclusión en embarcaciones con doble motor, cada hélice tendrá que girar en sentido contrario una de la otra.
La Cavitación
Este fenómeno se comenzó a advertir cuando fueron instaladas las primeras turbinas a vapor para propulsión en los buques militares ,al tener estas un mayor número de RPM que las máquinas alternativas. Cuando las hélices trabajan a un número alto de revoluciones hay zonas de las palas (bordes de diámetro extremo donde es mayor la velocidad lineal ) y de la cara de empuje de las palas donde se produce un aumento de la presión que, hasta puede hacerse mayor que la presión hidrostática en la que trabajan las palas normalmente. En realidad, la caída de presión en un punto no necesita ser igual a la presión en ese punto de la pala, sino solo la presión menos la presión de vaporización del agua a la temperatura que esta esté.
Si esto ocurre en esos puntos de la pala se rechaza al agua formando cavidades vacías o burbujas de vapor de agua que “implotan” produciendo picareteo o golpeteo que junto con el oxígeno que se desprende de las burbujas forman un fenómeno mecánico y químico notable con daños de erosión al material constitutivo de la hélice. Primero para tratar de solucionarlo se fijó un límite al empuje (en kilos) por unidad de superficie de pala para evitarlo. Después vieron los investigadores que la velocidad lineal también intervenía para que se produjera este fenómeno nocivo que disminuye la eficiencia de la propulsión y a veces suena como metralla o se confunde con vibraciones en la popa. Debido a la cavitación excesiva se puede deteriorar la hélice.
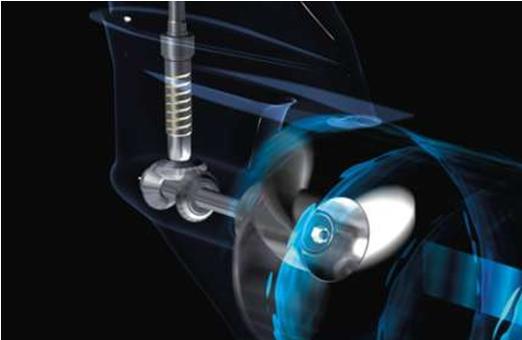
¿Porque empujan las hélices?
En principio podríamos entender el funcionamiento de las hélices por dos caminos distintos que no son más que las dos caras de una misma moneda.
Algunos lo explican con la comparación de un ‘saca corchos’ que al girar avanza penetrando en el corcho (que sería el agua). Esta comparación es una aproximación muy simplista y adecuada sólo para hélices de palas muy anchas con las que la velocidad del agua desplazada es muy lenta.
Pero el agua no es como la madera o el corcho del ejemplo anterior. Al ‘penetrar’ la hélice, el agua es empujada hacia atrás, pues no es un sólido rígido, actuando una ley de la física, conocido como el principio de acción-reacción.
Tanta agua empujemos hacia atrás, tanto barco es empujado hacia adelante. Si por ejemplo, la hélice empuja 100 kilos (masa) de agua a 50 kilómetros por hora, y si nuestro barco pesara solo 100 kilos, este se movería a también 50 kilómetros por hora (descontando las pérdidas de potencia y rozamientos). Pero si nuestro barco pesase 200 kilos, entonces se movería a la mitad de velocidad, 25 kilómetros por hora. Se conserva la cantidad de movimiento (masa de agua x velocidad de agua = masa de barco x velocidad de barco)
Puesto que el agua es un fluido, para que se produzca un empuje, tiene que haber una masa de agua desplazándose hacia atrás. Si la hélice avanzase en el agua como un saca-corchos, no habría ningún empuje. Es el caso de la hélice de un velero en punto muerto y arrastrada por el movimiento del barco. El eje del motor se mueve, la hélice gira sin producir ningún empuje.
Pero para que se produzca empuje necesariamente la hélice tiene que trasladar agua hacia atrás. Y trasladará más agua, cuanto menos avance la hélice respecto a su paso de avance teórico. Si por ejemplo una hélice tiene que avanzar 30 centímetros en cada vuelta (su paso de avance) eso es justamente lo que hará en el caso anterior del velero con el motor parado y el eje en punto muerto. Podríamos medir las revoluciones del eje para utilizarlo como corredera y medir la velocidad del barco. En el ejemplo anterior, si midiéramos 500 revoluciones por minuto, sabríamos que en ese minuto el barco habría avanzado 500 x 30 centímetros, es decir 150 metros/minuto que es más o menos 5 nudos.
Pero cuando el motor funciona, por cada vuelta de hélice, en vez de avanzar los 30 centímetros del ejemplo anterior, solo avanzará por ejemplo unos 25 centímetros. Es como si ‘resbalara’ esos 5 importantes centímetros. Decimos ‘Importantes’ porque son justamente esos centímetros los que trasladan agua hacia atrás y por tanto los que producen ‘empuje’.
Entender en detalle el funcionamiento de las hélices tiene muchas características, pues el agua tiene distinta presión cuanto más profunda sea, y la pequeña diferencia de presión entre la parte superior del agua y la que toca a la parte inferior de la hélice es muy apreciable. De hecho esta diferencia de presión es la que provoca el empuje lateral que hace que el barco tenga tendencia a ‘irse’ a babor o estribor dependiendo del sentido de giro de la hélice.
Y el tema se complica mucho más si seguimos profundizando, ya que cada aspa de una hélice en realidad se comporta como el ala de un avión y por tanto hay que analizar su funcionamiento como tal.
Podemos ‘trasladar’ el movimiento circular del aspa de la hélice imaginando que no es el aspa el que se mueve sino el fluido (da igual que sea agua o aire). Por tanto, transportamos el estudio totalmente al campo hidrodinámico, en donde aplicaremos la mecánica de fluidos en todas sus consecuencias. Debemos estudiar el empuje como consecuencia de la presión dinámica producido por la cara posterior, a la cual se suma (sobretodo) la succión producida por la cara anterior (la que está más a proa).
Unidad 2:
MANIOBRAS GENERALES
Jarcias fijas y móviles. Cabos de amarre. Importancia de las estachas. Maniobra de atraque y desatraque. Aproximación a muelle. Angulo de convergencia. Velocidad de maniobra. Distancia. Maniobras de buques de uno o dos propulsores con o sin vientos y corrientes. Conveniencia de desatracar abriendo la popa teniendo en cuenta la dirección del viento y la corriente. Cabos pasados por seno. Encapillar en bita ocupada.
Amarras
Las embarcaciones se amarran a un muelle o pantalán por medio de cabos potentes conocidos como amarras.
Podemos definirlas como: Los cabos que se emplean para amarrar un barco a un muelle, pantalán u otro barco, al objeto de que no se desplace en cualquier sentido.
Reciben el nombre de cabos, entre la gente marinera, las cuerdas o sogas que se tienen a bordo del buque (Como chascarrillo, a bordo la única cuerda es la del reloj).
Bajo el nombre de amarras, por tanto, se designan los cabos o estachas que sirven para afirmar el buque al atraque.
Se denominan estachas en general a las amarras utilizadas en los atraques y en los remolques, y son cabos de un grosor considerable.
Las amarras reciben un nombre distinto según la dirección en la que trabajan al salir del buque por la guía o por la gatera.
Pueden ser:
Largos, Springs, Travesines-Coderas.
LARGOS:
Son las amarras que saliendo por la proa o por la popa trabajan hacia proa o hacia popa respectivamente.
Trabajan hacia la misma cabeza de aquella por la que salen. Los largos de proa trabajarán hacia proa y los largos de popa trabajarán hacia popa.
Se usan para colocar o situar el barco en una posición inicial y se dan lo mas lejos posible (lo más en largo posible) hacia delante o hacia atrás respectivamente. Sirven para mantener el buque pegado al atraque y fundamentalmente para evitar los desplazamientos longitudinales del mismo. Por lo tanto, el largo de proa evitará que el buque se mueva hacia popa y el largo de popa evitará que se desplace hacia proa.
Portando del largo de proa, nos hace avanzar la proa y nos aconcha la amura hacia el muelle. Así mismo portando del largo de popa, avanzaremos hacia popa y aconchará la aleta hacia el muelle.
SPRING:
Son las amarras que saliendo por la proa o por la popa trabajan hacia popa o hacia proa respectivamente, es decir trabajan hacia la cabeza contraria de aquella por la que salen. Los springs son las amarras que se colocan en diagonal. Actúan de forma parecida a como lo haría un muelle, de ahí su nombre (en inglés spring significa muelle, entre otras acepciones). Uno de los springs parte de la proa del barco en dirección a popa, hasta alcanzar el punto de amarre, situado sobre el muelle, pantalán u otra embarcación, a la altura de la popa;
el otro spring parte de la popa en la forma contraria.
Son los que se utilizan para dejar el barco parado y en posición. Su principal misión evitar los movimientos longitudinales del barco cuando está atracado. De esta forma, el spring de proa evitará que el barco se desplace hacia proa y el de popa evitará que se mueva hacia popa.
Portando del spring de proa , esta aconcha hacia el muelle y lleva hacia atrás el barco. Portando del spring de popa aconcha la popa hacia el muelle y hace avanzar el barco hacia proa.
TRAVESINES:
Son amarras que trabajan perpendicularmente al plano longitudinal del buque. Se utilizan para dejar el barco pegado o aconchado al lugar de amarre. Como misión evitan que el barco se despegue de su atraque, evitan el movimiento transversal del barco con respecto a su atraque.
CODERA:
Se llama codera al cabo que firme a proa y popa sirve para amarrar el barco a una boya o a un barco, por el lado contrario al muelle donde estamos atracados, y, aproximadamente en la perpendicular de los puntos de partida.
La finalidad de las coderas es aguantar el barco, cuando hay mal tiempo, y evitar que golpee contra el muelle.
Se emplean para desatracar, halando de ellas, cuando el viento viene de la mar.
Se deben dar con un bote, y, por seno, para facilitar la salida del barco (dar por seno es dar la amarra de tal forma que los dos chicotes queden a bordo, una vez pasados por el noray o la argolla).
Como recopilación de todo lo comentado en los artículos anteriores podemos considerar:
Los largos sirven para situar el barco y los springs para que no se mueva. Al portar de las amarra las fuerzas que hacen atracar la proa hacen desatracar la popa y viceversa. Los traveses de proa y popa mantienen los extremos del barco aconchados, en especial al cargar la embarcación.
Los largos deben de tener una longitud igual a la eslora del buque, y se procurarán dar los más alejados que se pueda del barco (en dirección a la eslora) para que los ángulos sean lo mayor posible y, por tanto, aumenten las fuerzas de atraque hacia el muelle.
Al dar las amarras habrá que tener en cuenta la amplitud de la marea del lugar. Una buena longitud para los largos sería tres veces la amplitud de la marea; para los springs bastará con vez y media dicha amplitud.
Cabrestante
Un cabrestante, cabestrante o árgano es un dispositivo mecánico, compuesto por un rodillo o cilindro giratorio, impulsado bien manualmente o por un animal, o bien por una máquina, de vapor, eléctrica o hidráulica, unido el cilindro o rodillo a un cable, una cuerda o una maroma, que sirve para arrastrar, levantar y/o desplazar objetos o grandes cargas.
Los malacates (del náhuatl malacatl, huso, cosa giratoria) eran máquinas de tipo cabrestante, de eje vertical, muy usadas en las minas para extraer minerales y agua, que inicialmente tenían un tambor en lo alto del eje, y en su parte baja la, o las, varas a las que se enganchan las caballerías que lo movían. Posteriormente pasaron a utilizar energía eléctrica para mover un tambor horizontal y a estar en lo alto de una torre. Hoy en día se usa esta denominación para denominar a los cabrestantes en muchas partes de América Latina.
Las maniobras siguientes están realizadas con buque con hélice dextrógira y
atraque - desatraque al muelle con la banda de babor
Maniobra de atraque a un muelle
Las maniobras deben planificarse adoptando las precauciones necesarias, conociendo las características del lugar de atraque previamente, la presencia de otras embarcaciones maniobrando en ese momento, y las condiciones de viento, corriente y mar.
Se recomienda realizar la aproximación proa al viento o a la corriente, la que sea más fuerte; sin olvidar poner las defensas en las bandas del barco.
Hay que tener en cuenta las consecuencias de la maniobra con hélice levógira.
Atraque con viento de proa paralelo al muelle
La aproximación debe realizarse con poco ángulo (30º), avanzando con poca arrancada y el timón a la vía.
Una vez cerca del muelle, dejar en punto muerto y dar el largo de proa a tierra , dar un poco atrás con timón a babor para que la popa se aproxime al muelle, y dar el largo de popa. Finalmente, se dan los esprines.
Atraque con viento de popa paralelo al muelle
Esta es la maniobra que entraña mayor riesgo. La aproximación debe realizarse con poco ángulo (30º),
avanzando con poca arrancada y el timón a la vía. Una vez cerca del muelle, dar atrás con timón a babor para hacer caer la popa a babor y rápidamente dar el esprín de proa a tierra para detener la embarcación.
Después dar un poco atrás con timón a la vía y dar el largo de popa, y a continuación el de proa.
Finalmente se dan los esprines, y los travesines si son necesarios.
Atraque con viento perpendicular del muelle procedente de tierra
Esta es la maniobra más segura. En este caso la aproximación debe hacer con un ángulo más abierto,
poca arrancada y timón a la vía. Una vez cerca del muelle, dar el largo de proa y de popa muy rápidamente con el timón a estribor. Se da un poco de avante para meter la popa al muelle, y luego un poco hacia atrás con el timón a babor. Una vez esté la embarcación paralela al muelle se dan los travesines y luego los esprines para finalizar la maniobra.
Atraque con viento perpendicular del muelle procedente del mar o de fuera
Al igual que en el caso anterior, la aproximación debe ser con un ángulo abierto, poquísima arrancada y timón a la vía. Una vez cerca del muelle, dar el largo de proa y timón a estribor para que el barco que acomode al muelle por el empuje del viento. Después timón a la vía, la popa caerá al muelle y a continuación se da el largo de popa. Una vez acoplada la embarcación se dan los travesines y los esprines.
A las amarras hay que protegerlas de la humedad, del uso, del sol y de todos los agentes externos en general, y en especial del roce de la amarra contra el amarre al moverse el buque por el paso de otros buques o por el efecto de la resaca. Se consideran dos puntos importantes por los que sufren las amarres debido al roce:
en la gaza y en la parte del cabo que roza con las gateras. Para evitar en lo posible estos contactos, se forran las zonas conflictivas con lana, sacos a bien cuero y, últimamente con trozos de manguera de longitud y diámetro adecuados. Como precaución trataremos siempre de dar los cabos en aquellas zonas en las que no haya cantos vivos en contacto con ellas.
Maniobra de desatraque a un muelle
Las maniobras deben planificarse adoptando las precauciones necesarias, conociendo las características del lugar de atraque previamente, la presencia de otras embarcaciones maniobrando en ese momento, y las condiciones de viento, corriente y mar.
Las maniobras siguientes están realizadas con buque con hélice dextrógira y a babor al muelle. Hay que tener en cuenta las consecuencias de la maniobra con hélice levógira. Se recuerda que hay que reforzar las defensas sobre todo en la banda del muelle y en los puntos de apoyo contra el muelle.
Desatraque con viento de proa paralelo al muelle
Para el desatraque en estas condiciones, lo primero es timón a estribor, largar travesines, largos y el esprin de proa, aguantando solo con el esprin de popa. Ahora se separa ligeramente la proa del muelle con ayuda del bichero y el viento se encargará de abrir la proa. Después se da un poco de avante con el timón a estribor y se larga el esprín de popa hasta alejarnos del muelle con el timón a la vía.
Desatraque con viento de popa paralelo al muelle
Para ello hay que largar amarras de popa, aguantando solo con el esprin de proa. Con el timón a babor separar ligeramente la popa del muelle dando un poco avante, y luego con la popa ya separada dar un poco marcha atrás.
Después se larga el esprín de proa, y se finaliza la maniobra dando marcha atrás con timón a la vía.
Desatraque con viento de tierra perpendicular al muelle
Con el viento de tierra se largan todas las amarras excepto el esprin de proa, que ayudará a que abra la popa por el efecto del viento. Con la popa ya separada se da marcha atrás con el timón a la vía y se larga el esprin de proa. Esta maniobra se puede hacer de forma similar dejando el esprin de popa y abriendo la proa.
Desatraque con viento de fuera perpendicular al muelle
De forma similar al anterior, con el viento de fuera se largan todas las amarras excepto el esprin de proa, y se da un poco avante con el timón a babor a fin de ir abriendo la popa. Una vez la popa se haya separado, se da marcha atrás con el timón a la vía para finalmente largar el esprin de proa.
Encapillar
Acción de pasar las amarras al bolardo o bita.
Enganchar un cabo por medio de una gaza.
Enganchar un cabo al penol de una verga, o al rebaje de un palo, etc., con una gaza hecha en uno de sus extremos.
Alcanzar un golpe de mar una embarcación e invadir su cubierta.
Gaza
Lazo que se forma en el extremo de un cabo doblando y cosiéndolo.
Pasar un cabo de amarre por seno en una bita
Maniobra consistente en pasar un cabo por la bita sin encapillar la gaza estando el buque amarrado, cuando no existen personal de amarradores.
Facilita la maniobra para la zarpada.
Encapillar una gaza cuando la bita ya tiene gazas colocadas
Se deberá colocar la gaza desde abajo hacia arriba por dentro del seno de la misma, a fin de que cuando el cabo haga fuerza no se azoque con las otras gazas ya colocadas, y así permitir sacarla sin inconvenientes.
Curva evolutiva o de evolución
En navegación, recibe este nombre, la curva descrita por el centro de gravedad de un buque desde el momento en que se coloca la pala del timón a una banda hasta que la evolución tiende a convertirse en una circunferencia.
En ella se destacan algunos elementos característicos a saber:
Avance: es la distancia entre el punto inicial (A) de la maniobra y el punto más alejado en sentido trasversal a la dirección de avance inicial (Ri).
Traslado: o traslado lateral, es la distancia entre la dirección original y cualquier punto de la curva evolutiva. Tiene especial interés observar el traslado para el momento en que se llega al punto de caída de 90 grados respecto al rumbo inicial.
Diámetro táctico: es la distancia lateral entre la dirección primitiva de avance y la opuesta es decir el momento en que se alcanza un rumbo de Ri+180º.
Diámetro final: es aquel descrito por el buque en la fase final de la evolución cuando esta tiende ser una circunferencia.
Duración de la evolución: Es el tiempo en segundos que demanda alcanzar un rumbo igual al inicial.
Cuando se estudian las características evolutivas de un buque se trazan curvas para diferentes ángulos de pala (10º, 20º y todo timón a la banda), calado y asiento.
A menor ángulo de pala mayores dimensiones para la curva.
Atraque en puerto empleando ancla:
Frecuente existen puertos en donde se dispone de poco espacio y también en lugares sin mareas. Se realiza con más facilidad si la proa queda hacia fuera. Pondremos defensas en ambos costados y tendremos bien presente la posición
de las anclas de las embarcaciones entre las que queremos atracar, para no cruzar los fondeos. Para ello es deseable que todas las embarcaciones que atraquen de esta forma usen orinques para balizar sus anclas. Se procederá con la menor arrancada aproando al lugar donde deberemos dar fondo, y procurando que, al llegar a éste punto, la embarcación no haya alcanzado la perpendicular al atraque. Cuando nuestra popa libre la embarcación ya atracada daremos fondo, máquina atrás y filaremos poco a poco cadena haciendo cabeza sobre el ancla hasta quedar perpendicular al muelle y dentro de nuestro atraque. Cuando el costado del barco esté próxima al muelle, haremos firme la cadena y daremos cabos, amarrando de acuerdo a la banda que se desea atracar.
Cabos de amarre según el movimiento del buque
Largo pasado a tierra con arrancada y timón vía
El buque avanza o retrocede. Si es el largo de proa y el buque avanza, el cabo va cambiando de apariencia pasando sucesivamente de largo a travesin y de este a esprin. Lo contario ocurre si el buque retrocede llevando hacia popa o proa, separándose del muelle cuando se convierta en esprín.
Uso del travesin
a. Se vira uno y fila el otro
b. Se cobran en forma simultánea
c. Se viran en forma alternada
Empleo de ancla como auxiliar
Es para controlar la proa durante el atraque, como de abrirla en la zarpada, el ancla se fondeará en una posición tal que cuando el buque se halle a muelle la cadena trabaje por el costado con suficiente cantidad de cadena como para asegurarse que no garree cuando se aguante con ella el abatimiento. El fondeo se debe realizar tan alejado del muelle como sea conveniente según la eslora del buque y nunca debe pasar la posición la altura de la proa del buque.
Angulo de deriva, punto giratorio y centro instantáneo de rotación
Trayectoria del punto giratorio
Trayecto del centro de gravedad y
Trayectoria de la proa
Punto giratorio o pivote: donde el ángulo de deriva es nulo. Es aquel en el que el vector velocidad está dirigido siguiendo la dirección tangente a la curva evolutiva.
Centro instantáneo de rotación: Punto ideal alrededor del cual gira el buque
Trayectoria de la popa: ángulo de deriva de máximo valor.
Maniobras de atraque con anclas
Poco espacio para amarrar
Aproximación con poco ángulo hacia donde quedaría la proa del buque.
Se pasa el esprín con bastante cabo.
Que trabaje el esprín con maquina avante y timón hacia fuera del muelle.
Si es necesario filar el esprín hasta que buque este paralelo al muelle.
Acercarlo con los travesines.
Buque mono hélice dextrógira usando ancla
Rumbo perpendicular al muelle
Con la proa dirigida hacia el punto de atraque donde se hará firme el largo, se deja caer el ancla por la banda opuesta a la de atraque.
A unos veinte metros del muelle se pone frenos al cabrestante para que el ancla haga cabeza y se pasa el cabo.
Maquina avante y timón a la banda contraria del ancla fondeada. El buque rabea y la popa cae segura.
A 45 grados del rumbo de caída se fila algo de cadena dejando que el buque vaya hacia adelante y la proa no se aleje del muelle.
Se lasca el cabo de proa, esprín y se pasa el largo de popa, quedando paralelo al muelle
A media eslora del punto de amarre. Se da maquina atrás y se amarra en su posición final.
Verificar que los cabos y la cadena forme el conveniente seno.
Atracando con poco espacio en una dársena
No se puede poner la proa perpendicular al muelle.
Para amarrar proa afuera, navegar paralelo al muelle.
Se realiza una guiñada hacia fuera y se fondea el ancla de la banda contraria a la que se quiere amarrar. A la altura de la bita que luego se amarrar a la proa.
Verificar distancia adecuada que el ancla haga cadena y permita virar el buque correctamente.
Se cae con timón a la banda que da al muelle.
Ya en dirección contraria al rumbo inicial se levanta timón, y el buque ya paralelo al muelle se ira cerrando por acción de la cadena.
Se pasarán los largos de proa y popa con los que cobrando y trabajando convenientemente el buque se ira en paralelo al muelle hasta su amarre final.
El ancla debe ser fondeada, como mínimo la eslora del buque.
Desatraque usando anclas
Amarrado por babor
Es algo más difícil.
Abril la proa, con maquinas y timón babor o usando un golpe de cabrestante.
Comenzar a virar la cadena del ancla y se pondrá maquinas avante despacio y timón a bb.
Usar el travesin proel, se lasca y en paralelo, hasta que el ancla este a pique .
Amarrado por estribor
Se abre la popa con maquinas y el esprín proel.
Luego se pone maquina atrás al tiempo de ir virando la cadena.
La hélice dando atrás produce una fuerza lateral que hará rabear la popa a babor con lo que evitará que quiñe hacia el muelle.
Al tiempo la proa es abierta virando la cadena.
Evitar que el buque tome arrancada hacia atrás, para no traccionar con la cadena.
UNIDAD 3:
MANIOBRAS ESPECÍFICAS
Maniobra de hombre al agua. Seguridad de los tripulantes o pasajeros. Como actuar en caso de una caída al agua por parte de un hombre al agua. Acciones a ejecutar por el tripulante que lo avista. Curvas de rescate de hombre al agua. Como utilizar las mismas, teniendo a la vista al náufrago. Modos de uso de las Curvas de Evolución o Boutakow. Rescate del náufrago. Formas seguras para el rescate. Elementos de seguridad.
IDEAS CLARAS
Las cifras hablan por sí solas: las caídas involuntarias al mar son la principal causa de las muertes y desapariciones que se producen en el mar. Resulta por tanto fundamental que cualquiera que se eche a la mar tenga las nociones suficientes para, por un lado intentar evitar estas caídas, y por otro saber reaccionar en caso de que ocurran, tanto si el que se cae es un compañero como si es uno mismo.
PREVENCIÓN, ANTE TODO
Según afirma un viejo refrán de la mar: “Una mano para uno mismo y otra para el barco”. Efectivamente, el hombre de mar debe velar por su seguridad, puesto que la prevención es siempre el mejor remedio.
Pero también es importante que cada uno vele por la seguridad del resto de compañeros, estando pendientes en todo momento de lo que están haciendo, sin perderles nunca de vista durante demasiado tiempo...
Resulta evidente que la vida a bordo exige que nos movamos de manera casi constante de un lugar a otro, que realicemos determinados trabajos... pues bien, hay que tener presente que en un barco siempre existen una serie de actitudes de trabajo y estancia cotidianas que pueden ayudarnos a prevenir accidentes como la caída al agua.
Tome como hábitos los siguientes puntos:
– Intente desplazarse siempre con las piernas flexionadas y el cuerpo inclinado hacia el centro del barco.
– Cuando tenga que realizar algún trabajo físico, intente apoyar bien las piernas.
– Intente prever los movimientos que va a efectuar el barco, algo que sólo se consigue si permanecemos atentos a la mar.
– Ponga precaución si necesita sujetarse: debe hacerlo siempre a algo que sea resistente y esté bien anclado al banco: no está de más que tengamos localizados previamente todos esos puntos de apoyo que podamos llegar a necesitar.
– Lleve zapatos con suela antideslizante, tenga en cuenta que las suelas lisas suponen todo un peligro en una superficie húmeda.
– Al caminar deberemos poner especial cuidado para no dejarnos enrollar por un cabo o un cable.
– Realizar comprobaciones regulares del estado de las líneas de vida, de los puntos de fijación y del arnés.
– En caso de que el tiempo empeore, lleve puesto siempre arneses y chalecos salvavidas. Estos materiales
de seguridad son siempre recomendables además durante la noche. Cuando el tiempo empeora los movimientos
del barco se convierten en bandazos, además todo se moja y, por consiguiente, resbala. En estas circunstancias
toda precaución es poca.
– Colocar redes de protección alrededor del barco en los candeleros, para impedir que los niños se caigan.
– Deberemos estar especialmente atentos durante las maniobras, cuando diferentes elementos del barco cambian de sitio (botavara, velas, escotas...).
– Nunca deberemos quedarnos dormidos en cubierta si nos encontramos solos.
EQUIPO DE SEGURIDAD “EXTRA”
No vamos a hacer mención del equipo de seguridad exigido legalmente que, como todos sabemos, varía en función del tipo de navegación que se realice y de las características de la embarcación. Queremos más bien hacer mención a ciertos elementos “extra” que pueden garantizar nuestra seguridad y la de toda la tripulación en momentos complicados.
Nombraremos dos elementos que nos resultan imprescindibles:
– Salvavidas con luz: redondos y cerrados o en herradura y abiertos, estos salvavidas deberán estar siempre a mano y preparados para poder ser lanzados al náufrago. No deberán estar atados al barco. Su luz automática se encenderá al darse la vuelta con el lastre y conectando las pilas.
Su luz tiene dos ventajas: la persona que está en el agua localizará este punto de apoyo de manera inmediata y quienes estén en el barco realizando las labores de salvamento también podrán ver al náufrago en todo momento.
Sobra decir que deberán estar en perfecto estado.
– Bastón luminoso químico: puede señalar nuestra situación en la noche, ayudando para que podamos ser localizados y no estorba en el bolsillo.
QUÉ HACER CUANDO UNA PERSONA CAE AL AGUA
Como ante cualquier situación que reviste peligro, cuando se cae una persona al agua, existe una forma de actuar, algo así como unas normas no escritas pero que conviene conocer para poner en la práctica en el momento en que suceda.
Sencillas conductas que pueden ahorrarnos un serio disgusto.
Siga los siguientes pasos:
1.- Grite: ¡Hombre al agua! Todo lo fuerte que pueda.
2.- Detenga inmediatamente la embarcación.
3.- Uno de los ocupantes del barco deberá quedar encargado de vigilar a la persona, señalándola para que el resto sepan dónde se encuentra. Resulta fundamental no perder de vista al náufrago, puesto que su localización posterior puede llevarnos demasiado tiempo (del cual con seguridad no dispondremos).
4.- Quite el piloto automático.
5.- Lance hacia la persona que está en el agua los elementos de salvamento adecuados: flotador, cabos.
6.- Lance al mar también elementos flotantes de señalización, a ser posible que sean reflectantes.
7.- Anote la hora exacta de la caída, el rumbo seguido y la posición.
Por supuesto, nunca deberemos tirarnos al agua en un gesto heroico de compañerismo, puesto que podemos aumentar el problema.
CÓMO SACAR A UN NÁUFRAGO DEL AGUA
Tras el accidente y la comprobación de la situación, llega el momento de intentar subir al marinero de nuevo a la embarcación. Una labor para la que se necesitará actuar de manera firme y rápida, teniendo bien claros los pasos
a dar en cada momento (algo de lo que sin duda debe responsabilizarse el patrón), puesto que cualquier duda puede suponer la diferencia entre la vida o la muerte del náufrago. En principio podemos pensar que la escalera de baño es la opción más fácil y rápida y así sería si la situación fuera la más sencilla; es decir, una persona que cae, no se lesiona y puede volver “tranquilamente” al barco. Aunque el náufrago no tenga ningún tipo de lesión, la situación se complica mucho cuando la persona que se ha caído lleva encima un traje impermeable, botas, equipo de seguridad... un conjunto que puede subir su peso hasta más de 100 kilos, ¿ha intentado alguna vez subir por una de estas pequeñas escaleras con ese peso encima?... Además, puede que el mar no esté todo lo tranquilo que debiera y moverá la popa de manera peligrosa, pudiendo dar un golpe al accidentado que, sin duda, complicaría aún más la situación. Aún así, si lapersona en cuestión se encuentra bien (no ha sufrido ningún golpe y no está aturdido) y quienes estamos en el barco podemos prestarle ayuda para subir, la escalera puede convertirse en una buena opción (aunque sin duda cansada).
Sin embargo, lo más habitual es que el náufrago no se encuentre en situación para subir al barco por la escalera de baño.
Casi con seguridad, nos encontraremos con una persona totalmente debilitada y asustada, incapaz por tanto de subir a la embarcación por sí misma.
Será por tanto una ardua labor para la que conviene estar preparado:
– Amarrar al barco a la persona caída: será lo primero que deberemos hacer. Una vez que hemos posicionado el barco a la altura del náufrago, dejándolo a sotavento protegido por el casco del barco, le haremos llegar un cabo para que se amarre, o bien lo amarraremos nosotros (con un as de guía), para después ir trayéndole contra el casco (con cuidado si el mar está agitado). La maniobra de izado requerirá de mucha más precaución y deberá realizarse muy poco a poco.
– La neumática auxiliar: en la mayoría de los casos lo más eficaz es echar al agua una neumática auxiliar, atándola por la proa y popa del barco y guardándola al costado o en popa y subir a ella al accidentado. Después vendrá el trabajo de pasarlo al barco pero, en principio, ya estará a salvo. La neumática deberá estar hinchada o la hincharemos a toda rapidez y en ella deberá subirse alguien de la tripulación (lo que no siempre resulta fácil, sobre todo si el mar está revuelto).
La neumática deberá permanecer siempre amarrada para que no se la lleve el viento.
Otra maniobra delicada será la de pasar del auxiliar al barco, lo que deberá realizarse con cuidado. Puede que merezca la pena subir la proa de la neumática a la popa del barco, dándole un fuerte tirón, intentando evitar los golpes de la popa olos siempre arriesgados saltos entre dos barcos que se encuentran en movimiento. A pesar de que en principio puede parecer un método más lento, suele ser el más eficaz cuando la persona que se ha caído está dañada, cansada, cuando es de alto peso...
– Tomar al náufrago con las manos: puede que sea la primera reacción de cualquiera de nosotros: echar las manos a la persona que se cae, para intentar ayudarle; aunque por supuesto no es una tarea fácil de realizar. Se requiere, principalmente, de mucha fuerza y también de mucha precaución en caso de mal tiempo, puesto que un golpe de mar puede terminar con todos en el agua...
Muchas veces lo más seguro es realizar el trabajo de rodillas (para evitar resbalones y para tener más fuerza).
– La driza: una solución rápida y, en principio, fácil. Utilizaremos la driza del spi, largándola para que llegue al agua, añadiéndole un aparejo potente para facilitar la subida. De esta forma, la driza se engancha al arnés del náufrago y bajamos la guindola para izarlo a bordo.
– Escaleras de emergencia: actualmente en el mercado podemos encontrar escaleras de emergencia que pueden sernos de gran utilidad, sobre todo si navegamos solos. Estas escaleras se colocan colgadas en los guardamancebos dentro de unabolsa, con un chicote al que se pueda llegar desde el agua y que, al tirar de él, saldrá una escala de cincha con peldaños. Otros modelos se encierran en un pequeño contenedor/cilindro que debe ser colocado en el espejo de popa, haciendo tan solo un orificio. Sobra decir que no resulta fácil subir a bordo por este tipo de escaleras: se mueven, se retuercen, se precisa tener cierta fuerza física... pero pueden ayudar a salvarnos la vida.
– Cabo por popa: aunque su seguridad es discutida por muchos, un cabo de unos diez metros largado por la popa y firme a la cornamusa, arrastrándolo al navegar no afectará a la navegación y puede ser el agarradero necesario en caso de caída involuntaria al mar. El cabo deberá tener nudos de gran tamaño cada dos metros (aproximadamente) y una gaza con as de guía al final para meter la mano y la muñeca.
SI ES USTED EL NÁUFRAGO, CÓMO ACTUAR
Para que todo llegue a buen fin es tan importante la labor de los que están en el barco como la de la persona que ha caído al mar. Siempre y cuando se encuentre en las circunstancias adecuadas, el náufrago deberá tomar una serie de medidas que favorecerán el rescate.
A continuación, las resumimos:
– Mantener la calma: imprescindible, si entramos en estado de pánico sólo conseguiremos complicar la situación. Aunque resulta fácil de decir, somos conscientes de que en el agua y con baja visibilidad puede parecer que el barco se aleja rápidamente,
lo que sin duda pone nervioso a cualquiera... a esto se suma el hecho de que casi con seguridad habrá oleaje, viento, frío...
Lo más importante es mantener la confianza en la capacidad de cada uno, en el patrón de la embarcación y en el resto de compañeros.
– Colóquese la capucha: puede parecer una simpleza, pero no conviene olvidarse de hacerlo puesto que nos será de gran ayuda en diferentes campos: protegerá nuestra cabeza (es la zona por donde primer perdemos la temperatura corporal) y ayudará en nuestra localización (suelen estar realizadas en colores vivos y con bandas reflectantes).
– Elimine el peso: saque de los bolsillos todos los objetos pesados que no le sirvan.
– Quítese el calzado: si se trata de botas, puede utilizarlas como flotadores puesto que si se vacían y colocan boca abajo nos ofrecerán una flotabilidad extra que sin duda agradeceremos (pruebe a colocarlas dentro de la ropa).
El ahorro de energía es fundamental, para ello:
– Intente agarrarse a todo lo que flote (con seguridad le lanzaran cosas desde el barco: colchones, defensas...).
– No intente alcanzar el barco nadando, sólo nos servirá para gastar energías.
– No grite. Si lleva puesto el chaleco salvavidas, recuerde que dispone de un silbato que resultará mucho más efectivo y menos cansador.
– No se quite la ropa: puede que dificulte la natación, pero hará que mantengamos algo más de calor.
– Para mantener el calor: tenga en cuenta que la posición fetal es la más adecuada.
– Procure señalizar su posición al barco. Tenga en cuenta que aunque usted no pueda ver al barco, lo más normal es
que los tripulantes de la embarcación, situados más arriba que ustedes sí puedan verlo, siempre y cuando usted les marque el lugar donde se encuentra.
– En caso de que le lancen un cabo desde el barco, agárrelo y hágase una lazada con as de guía alrededor del cuerpo,por la cintura y debajo de los brazos, para evitar que salga por la cabeza en caso de que tiren de él con cierta fuerza.
Nunca lo permita- Que cunda el pánico y cada cual se ponga a hacer lo que le parezca más oportuno. El capitán debe dar las ordenes claras y concisas.- Que otro tripulante se tire al agua para socorrerle. Esto hará el problema mucho más complicado, ya que tendrá que buscar a dos tripulantes y contará con uno de menos para ayudar en las maniobras de recuperación.- Que se nos pierda de vista al náufrago. En el mar no es sencillo localizar una cabeza que se mueve entre las olas. Es sumamente fácil perderla de vista.
|
MANIOBRAS PARA LOCALIZAR A UN NÁUFRAGO
Cuando un hombre cae al agua, puede derivar muy rápido (según sea la fuerza de la corriente), por ello conviene actuar lo antes posible. Cuando se cae un hombre al agua es anotar la hora exacta en que ha sucedido el accidente, ya que permitirá calcular la zona en la que se pueda encontrar, teniendo en cuenta que un barco que navega a 5 nudos recorre 134 metros cada minuto.
La situación es complicada: a los evidentes peligros que supone un hombre al agua, hay que sumar el hecho de que no se lo tiene localizado y se corre el serio peligro de dañarle al dar la vuelta e intentar encontrarlo.
Si ocurre durante la noche se le arrojará una guindola con luz, sin perjuicio de arrojar otros objetos flotantes, para que los proyectores que barrerán la zona, tengan una referencia en caso de no ver al náufrago.
Si tenemos barcos en las cercanías, les informaremos inmediatamente del suceso por radioteléfono, izando la bandera "O" (OSCAR) del Código Internacional de Señales y daremos como mínimo seis pitadas cortas.
Si previamente hemos tirado objetos flotantes para intentar trazar una ruta de recuperación tenga muy presente que estos han sido empujados por el viento a mucha más velocidad que el náufrago, por lo que debe buscarlo a barlovento de lo que vea flotando.
Las posibilidades de supervivencia descienden rápidamente cuando baja la temperatura del agua. Cuando el cuerpo se enfría a menos de 32 grados centígrados se produce el desmayo y por debajo de 30º la muerte por hipotermia. Con el agua fría a 5 grados el tiempo de supervivencia es de solo 2 ó 3 horas, y a 15 grados de apenas 6 horas.
Existe una maniobra recomendada para cada tipo de embarcación, ya sea a motor o a vela:
Maniobra del Hombre al Agua de noche: Butakoff
En este caso, y sólo en este, aplica Butakoff.
Obviamente en el mar de noche no se ve nada y Butakoff nos ayuda a dar la vuelta dejando el barco en la misma estela en la que íbamos cuando sucedió el accidente.
Es importante en este caso de noche tirar la guindola con luz al agua.
Butakoff lo que consigue es un giro de 180 grados haciendo una forma de interrogación, de modo que al dar la vuelta, el barco navega por el mismo sitio donde cayó el hombre al agua.
Veamos los pasos:
1. Reducir máquina para hacer la maniobra con la mayor precisión posible.
2. Cantar en alto el rumbo opuesto al rumbo original (si ej. es de 90º, “cantar” rumbo 270º).
3. Virar inicialmente a los 70 grados.
Poner la máquina a mínima de maniobra y comienza la búsqueda del náufrago, que debería aparecer muy cerca de la proa. Se espera que el barco vuelva a pasar por donde cayó el náufrago.
Se recogerá al hombre al agua por barlovento.
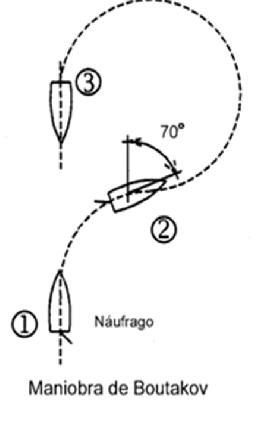
Además, se conocen otras posibles maniobras:
1.- Inversión de marcha: Una vez el hombre caiga al agua, se da toda máquina atrás para parar el buque e iniciar la arrancada hacia atrás, hasta donde cayó el náufrago. Este método no suele ser muy efectivo porque no se conserva el rumbo.
2.- Curva de evolución o maniobra de Anderson: en el momento en que el náufrago caiga al agua, se cae con todo el timón a la banda que cayó, para dar la curva de evolución. Tras caer unos 270º se tendrá al náufrago en la dirección de la proa.
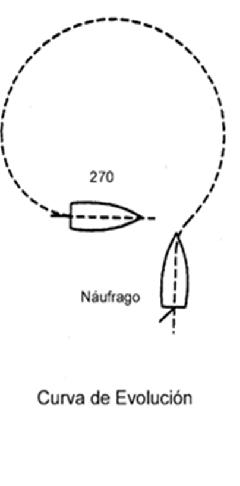
3.- Método del minuto: muy útil cuando se pierde de vista al náufrago al hacer la evolución. Se trata de mantenerse a rumbo opuesto durante un minuto, para después meter toda la caña a la misma banda de antes y al quedar al rumbo primitivo (al que se navegaba en el momento en que cayó el hombre), se aminorará la velocidad. El náufrago deberá aparecer por la proa o muy cerca de ella.
– Barco de vela: seguir los siguientes pasos:
– Virar por avante.
– No tocar la escota del foque.
– Cazar la escota de la mayor.
– Cazar la contra de la botavara.
– Cuando el velero haya virado, cambiar el timón hasta que quede bloqueado a sotavento
– En ese momento el velero derivará parado.
UnIDAD 4:
FONDEO
Equipos de fondeo. La línea de fondeo. Importancia del cabrestante y del barbortín. Como elegir un buen fondeadero. Tipos de fondeo. Función del ancla en el fondo. Cantidad de la cadena a filar. Ancla a pique. Conveniencia del ancla a la pendura. Fuerzas del sistema de fondeo. Acción del ancla en el fondo. Fondeo a la mediterránea. Uso de dos anclas. Fondeo a barba de gato. Virar sobre el ancla. Maniobra de leva. Amarre a una boya. Maniobras de fondeo por seguridad. Como llegar a la costa con rompiente en una embarcación menor. Importancia del mantenimiento del material.
TERMINOLOGIA UTIL
MANIOBRABLE: Se dice de un buque que maniobra con rapidez, obedeciendo pronto a los deseos de su comandante, ya sea para efectuar una caída, aumentar o disminuir la velocidad, parar las máquinas, etc.
REPETIDO: Zafarrancho que se cubre cuando un buque va a entrar o salir de puerto, a fin de que todo hombre de la dotación ocupe el puesto que le corresponde en la faena a que da lugar el hecho de llegar o zarpar de un puerto. Existe un toque (corneta o pito) para ordenarlo.
ZARPAR: Operación que efectúa un buque al ponerse en movimiento para lo cual deberá levar ancla si está fondeado o largar sus amarras si está sólo atracado.
RECALAR: Llegar a puerto; RECALAR A LAS 08,00 hrs. DEL DIA 14; Aviso que da el comandante de un buque con la debida anticipación para indicarle a las autoridades portuarias la fecha y hora que entrará al puerto.
FONDEAR: Acción de dejar caer el ancla en el punto de fondeo a fin a aguantar el buque en un sitio dado.
ACODERARSE: Amarrar la popa, ya sea a un molo o boya, después de fondear, evitando con esto que el buque cambie de orientación en su fondeadero.
ATRACAR: Operación que efectúa un buque al amarrarse de costado a un muelle o malecón, estableciendo contacto directo entre tierra y buque.
EMBARCARSE: Operación de subir a bordo,
EMBARCAR LA CARGA: Depositar la carga en sus respectivas bodegas. También se emplea este término cuando alguien de a bordo desea pasar del buque a la embarcación menor que lo ha de llevar a tierra o a otro buque, o bien para pasar de tierra a la embarcación menor.
DESEMBARCARSE: Acción de bajar a tierra, se emplea igualmente para indicar la operación de pasar de una embarcación menor a un buque, o de aquel a tierra.
REMOLCAR: Acción de mover un buque que no pude hacerlo con sus propios medios con ayuda de otro, que toma el nombre de remolcador.
ABARLOAR: Maniobra de remolcar un buque o embarcación amarrada al costado.
ESTIBAR: Operación de dejar cada cosa en su lugar, también se emplea cuando se carga un buque a fin de que la línea de quilla quede normal, es decir, que el buque esté adrizado.
ACLARAR: Término empleado para despejar un sitio dado, por Ej. ACLARAR ENTREPUENTES, significa salir de los entrepuentes, ACLARAR CUBIERTA, significa quitar de ella los cabos, alambres, defensas, etc. empleados en alguna maniobra.
ANCLAS Y CADENAS
ANCLAS: Son dispositivos de fierro, cuya finalidad es evita que los barcos sean arrastrados por los vientos y corrientes, manteniéndolos firmes y seguros en sus fondeaderos. Para este objeto las anclas se unen con sus respectivas cadenas y se lanzan al fondo de mar.
PARTES: En toda ancla se distinguen las siguientes partes: caña, brazos, cruz, uñas, pico de loro, mapa, ángulo de presa, arganeo y cepo.
CAÑA: Es el cuerpo principal del ancla, de forma cilíndrica algunas veces y más comúnmente cuadrangular en las anclas modernas.
BRAZOS: Son las dos piezas de fierro encorvado que se unen a la caña en la cruz, y en cuyos extremos están las uñas. Hay anclas con brazos fijos y anclas con brazos giratorios.
CRUZ: Es la unión de los brazos en la caña.
UÑAS: Son los extremos del brazo del ancla y termina en forma de punta.
PICO DE LORO: Es el nombre que toma el extremo de las uñas (la punta)
MAPA: Es la cara plana de la uña.
ANGULO DE PRESA: Es el ángulo formado por la superficie del mapa con la recta que une al pico de loro correspondiente con el perno de arganeo, de ordinario este ángulo es de 150º. Sin embargo, en la práctica, se llama ángulo de presa, al formado por la superficie del mapa y la caña, o bien, si es un ancla articulada, por la caña y el plano de la uña.
ARGANO: Es el grillete en forma de argolla que va en la parte superior de la caña y que sirve para entalingar el ancla.
CEPO : Es la barra de fierro que atraviesa la caña un poco más abajo del arganeo y que puede estar perpendicular o en el mismo plano de los brazos del ancla.
CLASIFICACION DE ANCLAS: Las anclas se clasifican en anclas de brazos fijo y anclas de brazos giratorios o articulados, a su vez pueden ser anclas con cepo. La finalidad del cepo es obligar al ancla a quedar con el plano de los brazos perpendicular al fondo, agarrando una de las uñas y contribuyendo con su peso.
ANCLOTES: Son anclas más chicas y de menor peso que tienen a bordo diferentes usos como: acoderar un buque, etc. Los anclotes más pequeños y de poquísimo peso se utilizan para fondear embarcaciones menores.
REZONES: Son anclas de muchos brazos (generalmente de 4 a más) que están destinados a ser arrastrados por el fondo del mar con el objeto de buscar objetos perdidos (rastrearlos) como: anclas, cadenas, fierros.
ARAÑA: Son rezones muy livianos que se emplean para sacar objetos chicos del agua, por Ej.: el orinque de las anclas, gorras y objetos diversos que se han caído al mar.
ANCLAS DE LEVA: Son las dos anclas que lleva un buque en los primeros escobenes de babor y estribor destinadas a fondear ordinariamente la nave.
MUERTO: Bloque de cemento o fierro que cumple con el objeto de fijar la posición de boyas por medio de un orinque.
CADENAS: Es el conjunto de eslabones de fierro unidos entre sí, uno a continuación del otro y que tienen numerosos usos, por ejemplo: cadenas de las anclas, rejeras, ondas, etc.
ESLABONES: Son los trozos de fierro de forma elíptica de que se componente las cadenas. Las hay de dos clases: eslabones con mallete y eslabones sin mallete.
MALLETE: Es un trozo de fierro que llevan en su parte central los eslabones, y que tienen por objeto darle mayor resistencia y al mismo tiempo evitar que las cadenas se tomen vueltas o formen cocas.
ESPICHE: Es el tapón de plomo, asegurando a golpes de martillo, que se coloca al pasador en su cabeza para evitar que por su forma cónica, se salga con el trabajo de las cadenas. No hay que confundir este “Espiche” con el que emplean las embarcaciones menores.
ANCLAS SIN CEPO O DE PATENTE:
Ventajas:
a) El ancla es más chica y su tenedero es igual de peso que el ancla con cepo, pero es superior al de ésta si las dos uñas agarran el fondo;
b) Mayor facilidad de estibarla a bordo y simplificación de los aparatos de maniobra, puesto que la ausencia de cepo permite introducir el ancla dentro del escobén sin necesidad de enganchar el aparejo de la gata ni terciarla y por lo tanto se puede zarpar más rápidamente.
ANCLA MARTIN: Las hay con o sin cepo. Los brazos se hallan en el mismo plano que el cepo y pueden girar unos 30º o 40º a cada lado de la caña, clavando ambas uñas en el fondo. Las con cepo, para terciarlas, llevan un grillete en un centro de gravedad, de modo que al quedar suspendidas en él, cuelgan horizontalmente teniendo en cuenta el peso de la cadena que va al escobén. Las Martín sin cepo constituyen una simple modificación de las con cepo, y hoy día son las únicas que se usan, pues permiten alojarlas en el escobén.
ANCLA ALMIRANTAZGO: Es de forma semejante a las anclas antiguas, lleva el cepo en un plano perpendicular al de los brazos, son de una sola pieza, pudiendo el cepo correr a través del orificio de la caña para amadrinarse.
ANCLA HALL: Es el tipo de ancla más usado en los buques de guerra modernos. No tiene cepo. La cruz es de acero fundido y forma cuerpo con los brazos, lleva un sacado rectangular en que entra la caña, siendo sujetada por un corto perno que permite el giro. Los brazos pueden formar ángulo hasta 40º con la caña.
TERMINOS COMPLEMENTARIOS RELACIONADOS CON ANCLAS
ENGRILLETAR: Término con que se designa la operación de unir por medio de grilletes de unión, ya sea dos paños de cadena, o bien, un trozo o pernada de cadena a un objeto cualquiera.
ENTALINGAR: Operación de unir el chicote de una cadena con el arganeo de su ancla o boya.
LEVAR ANCLA: Operación de virar (echar dentro) cadena del ancla de leva.
LEVANDO se dice de un buque que está virando su cadena. Los buques de guerra indican esta operación izando por la banda correspondiente al ancla que se vira, un gallardetón especial, el cual adopta diversas posiciones conforme si el ancla está en el fondo, arrancó o está arriba.
ARRIBA CLARA: Voz que indica que el ancla afloró clara a la superficie.
PENDURA: Término que indica que el ancla cuelga de su cadena sin tocar fondo.
A PIQUE: Voz que indica que el ancla está directamente bajo la proa y con la cadena tensa.
ARRANCÓ O ZAFÓ: Voz que indica que el ancla despegó del fondo.
DESVIRAR: Acción de echar afuera la cadena de un ancla, ya sea en la maniobra de fondeo o bien porque ésta, al levantarla afloró con otras cadenas.
ABOZAR: Operación de asegurar la cadena por medio de las bozas que para este objeto hay en el castillo.
AGARRAR: Operación que efectúa el ancla cuando sus uñas se entierran en el fondo asegurando el tenedero.
GARREAR: Término que indica que el buque está arrastrando al ancla, es decir, que ésta no lo está sujetando sino que se está arrastrando por el fondo.
TRABAJAR: Operación de retirar la cadena del ancla por medio de las máquinas a fin de que ésta agarre.
FONDEAR A LA GIRA: Cuando se dispone de espacio suficiente para que el buque pueda girar (bornear) libremente alrededor de su ancla, se fondea con una sola ancla lo que toma el nombre de “a la gira”. tiene la ventaja de que su maniobra de virar es más sencilla y rápida, y por último, en caso de mal tiempo o emergencia en que necesita zarpar rápido, podrá abandonar su ancla, quedando siempre otra a bordo.
FONDEAR A DOS ANCLAS POR LA PROA: Fondear con dos anclas dejándolas éstas muy cerca una de la otra; operación factible en tenederos donde por efectos de corrientes o vientos, la orientación de la proa se mantenga más o menos constante.
IDEAS SOBRE CONSIDERACIONES PARA FONDEAR:
Al tomar el fondeadero, el Comandante deberá considerar la profundidad de éste, su naturaleza y el espacio disponible. De la profundidad dependerá la cantidad de cadena que debe filar. Como norma, a mayor profundidad, en proporción, deberá filarse menos cadena que a menos profundidad, y la cantidad de cadena deberá ser igual a cuatro o seis veces el fondo. De la naturaleza del fondo dependerá si toma o no el fondeadero en estudio; éste puede ser cascajo, arena, roca, conchuela, arcilla, fango duro, fango blando, etc., se considera mejor el de fango duro, en último término considérese el de roca. Del espacio disponible dependerá si fondea con una sola ancla, a la gira, a dos anclas, si se acodera, etc.
· Fondear: Es la acción de fijar una embarcación al fondo mediante la utilización de uno ó varias anclas.
· Garreo. - Es el movimiento que el barco realiza cuando ha perdido el ancla su cama (se ha desligado del fondo) y comienza a derivar por la acción combinada de la corriente de marea y viento.
· Levar. - Se llama levar a la maniobra que consiste en virar la cadena del ancla hasta arriba, quedando aquella estibada en el escobén o en su varadero habitual.
· Tenedero. - Se denomina tenedero al lugar elegido para fondear el buque.
ELECCION DEL FONDEADERO O TENEDERO
Deberá hacerse teniendo en cuenta los siguientes criterios:
· El lugar elegido debe estar protegido contra los efectos del viento y de la mar cuando haya mal tiempo.
· La clase de fondo debe ser de una calidad tal que el ancla se clave, no arrastre por el fondo y que luego sea fácil de zarpar o arrancar del fondo. La inclinación del fondo también es un factor importante a tener en cuenta.
· Profundidad del agua, zona de borneo y posibilidades de salir rápidamente a aguas libres en caso de que empeore el tiempo bruscamente.
ACTIVIDADES A REALIZAR PARA ELEGIR UN FONDEADERO
Para cumplir con la primera condición, del párrafo anterior se elegirá el fondeadero examinando la carta náutica para estudiar la configuración de la costa, eligiendo un lugar que nos proteja de los vientos predominantes o reinantes, o al menos de una parte de ellos. También se pueden estudiar los derroteros, libros que nos informan de las características de la costa, de las corrientes y vientos predominantes, de los faros y lugares conspicuos de la costa y de su apariencia desde la mar, de los mejores lugares de fondeo, etc. Si, en este lugar elegido bajo los criterios del primer punto, además, se cumplen las condiciones de del punto segundo, por la calidad del fondo, se dice que es un buen tenedero, en caso contrario se dice que es un mal tenedero.
Son buenos tenederos los fondos de arena fina o gruesa, cascajo, conchuela y fango.
Son malos tenederos los fondos de piedra, algas y arcilla.
En cuanto al fondo de arcilla, decir que en principio es un buen tenedero pero tiene el inconveniente que si el ancla se desclava del fondo, las uñas ya no vuelven a clavarse por tener gran cantidad de arcilla entre la caña y los brazos.
Para la elección de fondeadero se tendrá, también, en cuenta como es el declive, es decir como aumenta la profundidad en el lugar. Por ejemplo, si el declive del fondo es hacia alta mar, si el barco garrea con vientos de tierra, el buque iría a fondos mayores con lo que podría darse el caso de que el ancla quedase colgando o con demasiada poca cadena con relación al fondo.
En general se procurará largar una longitud de cadena (o cabo en su caso) de entre 3 y 5 veces la profundidad en el lugar, tomada desde la cubierta principal del buque.
También será necesario conocer que profundidad tendremos en el fondeadero elegido. Si hay mucho fondo, se arriará el ancla sobre molinete, al menos un par de grilletes, para que el ancla no caiga desde tanta altura, evitando de esta forma esfuerzos al molinete, cadena y ancla.
PROCEDIMIENTO DE FONDEO
Una vez elegido un sitio de fondeo, que se llama tenedero, se procederá de acuerdo a lo siguiente:
· Prepara el ancla, destrincándola y apeándola, es decir sacando la caña del escobén.
· El ancla y su cadena, se dejara firme sobre freno por lo cual para largar el ancla cuando estemos en posición de fondeo sólo debemos aflojar el freno, saliendo ancla y cadena por su propio peso.
· En condiciones normales se larga o deja salir una longitud de cadena de entre tres o cuatro veces el fondo. Cuando hace mucho viento o la fuerza de marea grande se larga una longitud de cadena de entre 5 o 6 veces el fondo.
· Teniendo en cuenta la resultante de la corriente y viento se lleva proa a la misma con poca maquina hasta llegar al lugar de fondeo, en donde se da fondo y maquina atrás al mismo tiempo que va saliendo cadena hasta parar el barco.
· Se da por terminada la operación cuando veamos que el ancla ha hecho cabeza, es decir, cuando comprobamos que la cadena trabaja y vuelve a estar a pique (en posición vertical o casi vertical con respecto al fondo) varias veces.
· Comprobar la situación y observar que la embarcación mantenga la posición elegida.
· Determinar el circulo de borneo, el mismo que se define como el movimiento circular que por la acción del viento y o la corriente realiza el barco teniendo como punto de giro el ancla y como radio la cadena.
RIESGOS ASOCIADOS AL FONDEADERO
Riesgos de Garreo
Para evitar este riesgo hay que procurar que la línea de fondeo no trabaje directamente sobre la caña del ancla, razón por la cual es aconsejable que el primer tramo de dicha línea de fondeo a partir del ancla sea de cadena y que ésta quede correctamente tendida. De ahí la necesidad de largar una cantidad suficiente de línea de fondeo.
Riesgos al levar anclas
Cuando el ancla se eleva del fondo se dice que zafó. Durante la maniobra de virado de cadena se irá vigilando en qué dirección trabaja ésta indicando la dirección con la mano. Si existiese corriente o mucho viento que dificultará la capacidad de virar debido a que el molinete no tuviese la fuerza necesaria se ayudará con maquinas dando un poco de maquina avante.
RIESGOS ASOCIADOS A LA MANIOBRA CON BOZAS/ANCLAS/CADENAS
Atascamiento
· En caso de un atascamiento, no deberá manipularse la cadena, sin previamente enganchar el freno del molinete, como medida adicional se podrá colocar una retenida con una pasteca o una cadena con grilletes.
· Previo al desastacamiento, deberá observarse la dirección de trabajo de la cadena y trabajar en dirección contraria a las fuerzas generadas, buscando siempre estar protegidos por la estructura de la embarcación.
· Para desatascar un cabo, deberá primero dejar que por efecto del mar, el cabo forme un seno, luego con los guantes colocados, procederá a desatascarlo, teniendo cuidado que el cabo pueda volver a tensarse.
· Presencia de personal en la zona de maniobra
· Solo permanecerán en la zona de trabajo, el personal designado para la maniobra.
· Elementos de maniobra sobre cubierta y en movimiento
· Cuando este sobre la cubierta, deberá tener especial cuidado en los cables, bozas y cadenas, que están siendo empleados en una maniobra y que por efecto del mar, estén trabajando (generando tensión). Estos elementos pueden golpearlo ocasionándole heridas y/o fracturas de huesos.
· Materiales sobre la cubierta de maniobra
· La cubierta deberá encontrarse despejada de todo material ajeno a la maniobra, debido a que cualquier cable/boza/cadena que se encuentre trabajando puede golpearlo haciendo que salga despedido sobre el personal que se encuentra trabajando en cubierta.
CIRCULO DE BORNEO
Una vez fondeados, el buque continúa sometido a las fuerzas del viento y la corriente, pivoteará, en función de éstas, sobre el ancla describiendo un círculo que se llama círculo de borneo.
El radio de este círculo dependerá de la relación de cadena filada con respecto al fondo en el lugar de fondeo. Cuando se fondea en fondeaderos concurridos el radio del círculo de borneo será una magnitud a considerar ya que si es muy elevado puede dar lugar a que se colisione con otros buques mientras se permanece en el fondeadero, en el caso de que distintos buques evolucionen de forma opuesta a lo largo de sus círculos de borneo.
GARREO. REFERENCIAS DE TIERRA. ALARMA DE SONDA
Es importante, una vez fondeados, cuando ya el ancla ha hecho cabeza, el obtener una posición por cualquier método. A los niveles que nos ocupan, se pueden tomar varias referencias de tierra, recomendando que sean enfilaciones o sino un mínimo de tres referencias y en ángulos que se aproximen, en la medida de lo posible, a los 90º, ya que ello proporcionará un mejor corte de las líneas de posición que representan tales referencias.
Obteniendo de esta forma una posición del buque, se podrá vigilar un posible garreo del mismo, previendo situaciones de deriva peligrosas para la seguridad del buque.
Adicionalmente a las marcas o referencias a tierra tomadas, deberemos establecer una alarma de sonda mínima en la sonda, de forma que cuando esta sonda mínima se alcance suene una alarma que nos avise del peligro de varar.
MANIOBRA DE FONDEO CON UN ANCLA
La maniobra de fondeo es aquella por la cual el buque deja caer el ancla al fondo.
Barco con propulsión a motor: Una vez elegido el lugar de fondeo, el buque se dirigirá a él con poca arrancada. Cuando se esté a poca distancia del lugar de fondeo elegido, se parará el motor, y cuando la proa haya llegado a la altura del lugar de fondeo se dará máquina atrás para parar la arrancada. Una vez el barco parado se dará fondo. Para que la cadena salga (file) a fin de que la cadena quede bien sembrada por el fondo, es necesario que el barco tenga un poco de arrancada atrás.
Un poco antes de que se hayan arriado los grilletes necesarios, se aprieta el freno en el molinete, o se dan una vueltas de la línea de cabo de fondeo a una bita (en caso de embarcaciones pequeñas, sin molinete y con ancla afirmada por cabo), para que el ancla agarre al fondo, lo cual sucede cuando vemos que se tensa la cadena.
Una vez el ancla agarre al fondo, se quitará el freno en el molinete o se largará el cabo de la bita, para permitir que siga saliendo cadena. Una vez largados los grilletes deseados se deberá ver como llama la cadena, es decir la dirección en la que trabaja.
Maniobra de fondeo con dos anclas
Existen varias formas de ejecutar esta maniobra:
1. Por la proa o mediterránea.
2. A barbas de gato.
3. A la marea de alta y bajamar.
Fondear con dos anclas por la proa o mediterránea.
Aproximarse al punto de fondeo con el viento por la proa y al llegar al lugar elegido se dará atrás a media máquina fondeando el ancla de babor. La proa del barco sobrepasará un tanto la posición de fondeo antes de quedar parado y además habrá caído a estribor por efecto de la hélice al dar atrás (tratándose de un barco dextrógiro). En esta posición daremos fondo al ancla de estribor e iremos filando a medida que vaya pidiendo.
Con dos grilletes en el agua, aproximadamente, frenaremos ambas cadenas para que se estiren por el fondo, y luego seguiremos filando hasta fondear los grilletes de cadena deseados, quedando así fondeados con las dos anclas por proa.
Fondear a barbas de gato.
Colocar proa a la enfilación en que deseamos que queden ambas anclas fondeadas y, al llegar al primer punto de fondeo, largamos el ancla de barlovento filando cadena para evitar que el barco se pare. Continuamos hacia el segundo punto de fondeo que estará a una distancia igual al número de grilletes que queramos dejar fondeados menos uno. Una vez que estemos en esta segunda situación aguantaremos la cadena del ancla ya fondeado, se dará unas paladas atrás para quitar arrancada y fondea el ancla de sotavento, separa, máquina atrás y fila cadena como acto seguido. A la vez comienza a virar la cadena de barlovento con lo que barco irá cayendo hacia esta banda hasta ocupar la posición deseada.
En este tipo de fondeo el plano de crujía del barco deberá quedar situado sobre la bisectriz del ángulo que forman ambas cadenas, que debe ser de 90º a 120º, sólo así será efectivo el hecho de haber fondeado a barbas de gato.
Fondeo a la marea de plea y bajamar (a la entrante o vaciante)
Se utiliza cuando viento y corriente vienen de direcciones opuestas o cuando se fondea en el curso de un río o laguna.
Siempre proa al viento se dirije al lugar de fondeo. Al llegar a él se fondea el ancla de barlovento que se irá filando para seguir avante hasta el segundo punto de fondeo, situado a una distancia igual al doble del número de grilletes que se desea queden fondeados. Una vez en él se para la arrancada y fondear el ancla de sotavento. A continuación se leva barlovento y filar sotavento hasta igualar la longitud de ambas cadenas.
Ventajas e inconvenientes de los distintos fondeos con dos anclas.
El fondeo con dos anclas por la proa tiene la ventaja de que si garrea una de las anclas aún aguanta la otra y que el levar es más rápido que al estar a barbas de gato o a la entrante o vaciante y tiene como inconveniente la posibilidad de que se líen las cadenas, tomen vueltas y el área de borneo es más extensa
El fondeo a barbas de gato tiene la ventaja de que se requiere poco espacio para bornear, en caso de garreo de un ancla nos aguantará la otra y como inconveniente fundamental es muy laborioso el levar las anclas.
La principal ventaja del fondeo a la entrante y vaciante es el reducido espacio de borneo y en cuanto a inconvenientes la dificultad para levar y la posibilidad de que las cadenas tomen vueltas.
Levar anclas estando fondeados con dos anclas.
Fondeados con las dos anclas por proa levar ambas hasta tener una longitud de cadena de dos grilletes, aproximadamente, en el agua. En este momento se continúa con la de barlovento y se deja sobre el freno pasando a levar la otra a la vez que se fila la de barlovento según pida.
Cuando el ancla de sotavento esté a la pendura se pasa al freno y se leva la de barlovento virándola hasta que quede estibada en el escobén. A continuación se pasa a estibar la de sotavento.
Si se está fondeado a barbas de gato o a la entrante y vaciante levar primero la de barlovento y luego la de sotavento evitando, con la máquina, que el barco vaya atrás con rapidez una vez zarpada la de barlovento.
MANIOBRAS DE FONDEO
Definición
Una maniobra de fondeo se puede definir como aquella en donde se pretende conseguir la detención o inmovilidad relativa del buque respecto del fondo, por medio de los equipos e instalaciones de fondeo que posea para ello. O bien en la cual el buque deja caer el ancla al fondo. Intervienen en esta maniobra una gama de factores, tales como fuerzas aplicadas en el buque producidas por agentes externos, naturaleza del fondo, longitud de cadena a filar, etc., que deben tenerse muy presentes, por lo que una buena ejecución dependerá en gran medida de una planificación previa y posterior vigilancia que garanticen que se ha logrado el propósito y por lo demás, se han minimizado todos los posibles riesgos.
Elección del fondeadero
Lo que respecta a la planificación de una maniobra de estas características, es la precaución necesaria que se debe adoptar para la elección de un lugar de fondeo. En los puertos la Autoridad Marítima indica el lugar de fondeo, el número de anclas, su dirección y la longitud de cadena en cada una de aquellas de acuerdo con el fondeadero y la estación. La Autoridad además prohibe el cambio de un fondeadero a otro sin permiso del Capitán de Puerto, salvo en casos de peligro y de absoluta necesidad previa comunicación.
En términos generales la planificación debe hacerse bajo los siguientes criterios:
a) Idealmente el lugar debe estar protegido de los efectos del mar, y viento predominante y actual, pudiendo ser este lugar un golfo, bahía o rada.
b) Que el fondo sea de buena calidad, de manera que el ancla trabaje en forma eficiente, y que permita un fácil despegue del fondo.
c) Que haya buenas enfilaciones para la determinación de la viada hacia el punto de fondeo.
d) Capacidad, el fondeadero debe permitir el libre borneo del propio barco y de los otros barcos con un adecuado margen de seguridad.
e) Tenga buenas referencias visuales y de radar, como salientes rocas u objetos artificiales.
f) Si se trata de un puerto, se deben verificar los lugares en que el fondeo se ve restringido por las vías de circulación de los Dispositivos de Separación de Trafico (D.S.T), obstrucciones submarinas, o radios de borneo de otras embarcaciones.
g) Otro aspecto que se debe tener presente, en lo posible, es conocer las características del fondo. Con un declive pronunciado hacia fuera y vientos de tierra el barco podría garrear e ir a parar a fondos más profundos, quedando con el ancla colgando sin llegar al fondo o con demasiado poca cadena.
h) También es necesario conocer la profundidad del fondeadero, para saber el número exacto de grilletes a fondear, o en el caso de que exista mucha profundidad arriar un número conveniente de paños, generalmente de 1 a 2 grilletes para profundidades mayores a 30 metros, para no someter a demasiados esfuerzos el cabrestante, la cadena y el ancla.
Adherencia del fondo:
En lenguaje marinero se llama tenedero al suelo del fondo del mar donde descansa y agarra el ancla. Es buen tenedero el que permite que el ancla se agarre bien sin enterrarse. El poder de adherencia de un buen tenedero se manifiesta con una fuerza equivalente al peso del ancla cuando se la cobra con la cadena a pique, es decir, que esta fuerza adquiere un valor igual al doble del peso del ancla.
Los fondeaderos de arcilla son buenos, pero tienen el inconveniente de que si el ancla garrea, es difícil que vuelva a morder pues se empasta, quedando envuelta en una bola de arcilla, razón por la cual es considerada mal tenedero. En caso de garreo es aconsejable levar el ancla y lavarla antes de repetir un nuevo intento de fondeo. El de piedra es el peor tipo de tenedero, pues el ancla resbala sin llegar a prenderse, corriendo, además, el peligro de enroscarse (engancharse entre las rocas). Si es necesario fondear en estos fondeaderos, no debe dejarse que el ancla golpee contra ellos. Para ello se debe arrear una buena cantidad de cadena sobre el barboten encapillado y recién después desencapillar y fondear el ancla abriendo el freno.
Velocidad de aproximación a la zona de fondeo
La velocidad de aproximación a la zona de fondeo depende en gran medida del tamaño y carga que tenga el buque, por lo que la velocidad será diferente para cada buque, y su magnitud dependerá de dichos factores. En términos generales un buque estando a unas dos millas de la zona debe moderar su marcha, disminuyendo las r.p.m. y detenerlas aproximadamente a media milla del lugar, manteniendo la arrancada para que el buque mantenga un mínimo de gobierno, una vez que la proa haya llegado al lugar se da máquina atrás para parar la arrancada de a poco y esperar a que el buque se vea detenido para dar la orden de fondo, sin embargo se debe mantener algo de arrancada atrás para que la cadena quede bien sembrada en el fondo. Donde hay barcos fondeados se debe transitar a baja velocidad la suficiente para gobernar, sin producir olas y manteniendo una constante vigilancia. Los barcos que ya están a la gira se han ganado su espacio, por lo tanto, quien llega después, debe maniobrar con precaución y fondear en un lugar que no estorbe su eventual zarpada ni obstruya su borneo. Hay que tener presente que buques de diferente eslora y desplazamiento tienen también diferentes períodos de borneo. Si un barco ha iniciado la maniobra de largar o levar anclas, mantenerse claro, pero si el que tiene intención de zarpar o de fondear advierte muy próximo a otro en tránsito, debería esperar que aquel lo supere para no estorbarle el camino.
Alistamiento para fondear
Mientras el buque se dirige al lugar para el fondeo, los oficiales y tripulantes asignados a las maniobras deben cubrir sus puestos.
Verificar que la comunicación sea expedita con el puente y tener preparado en cubierta todos los elementos que intervienen en ella, previamente chequeado su funcionamiento y condición, a modo de evitar posibles complicaciones.
Sacar tapas y fundas de los escobenes
Sacar trincas de mar, zafando las bozas y abriendo los estopores.
Es aconsejable arriar cadena de modo que el ancla haya salido del escoben hasta quedar a la pendura, verificando que esté clara y en correcta posición.
Desencapillar y dejar el ancla solo firme con el freno lista para fondear
Preparar esfera y revisar luces de fondeo, (esfera negra izado a proa durante el día y luz blanca todo horizonte durante la noche).
Izar correderas si las hubiera (remolcada o de tubo)
Funciones del Capitán, Oficial de proa y Contramaestre
De acuerdo con las instrucciones que el Capitán le imparta al oficial de guardia informará al primer oficial, al contramaestre y al jefe de máquinas la hora aproximada de fondeo para preparar la maniobra.
El oficial encargado de la navegación, deberá dejar en el puente, la derrota de aproximación al fondeadero claramente graficada en la carta de mayor escala posible.
El Capitán, una vez en el puente, se hará cargo de la navegación hasta el fondeadero modificando o no la derrota de acuerdo a las condiciones hidrometeorológicas y la cercanía de otros buques. Decidirá el método de fondeo, la longitud de cadena a fondear, las distancias a que variará la marcha del buque, las marcaciones o enfilaciones que determinarán las respectivas posiciones, la forma como lleva el ancla, tratando de analizar todo detalle que pueda significar riesgo para el buque y que le impida su objetivo; una maniobra adecuada y segura.
Dará personalmente las órdenes al timonel y las de cambio de marcha de la máquina.
Cuando considere que está en la posición de fondeo hará a proa el pedido de "Fondo".
Terminada la maniobra indicará en que condición de operación quedan las máquinas considerando la seguridad que ofrezca el fondeadero y la duración probable de la estadía.
El primer oficial comunicará al Capitán sobre el alistamiento del buque, así como de los inconvenientes que existieron y las medidas adoptadas, para subsanarlos.
Funciones del oficial de proa
El oficial de proa participa y recibe directamente las decisiones del capitán desde el puente, repitiendo o afirmando que la orden fue recibida y entendida claramente e informar una vez esta se haya ejecutado.
Debe poseer la suficiente competencia para entender y ejecutar sin vacilaciones las órdenes impartidas y estar capacitado para asumir ciertas decisiones en cualquier circunstancia durante la maniobra.
Repetir la voz “fondo”, para indicar al contramaestre que abra el freno.
Indicar los paños que van entrando al agua (primer paño en el agua, segundo paño en el agua….., etc.).
Indicar cuando el ancla se encuentre en el fondo (la velocidad de salida de la cadena será mucho menor).
Indicar periódicamente dirección y fuerza con la que llama la cadena respecto del casco, mientras se fila poco a poco cadena en la medida que esta vaya llamando, hasta tener la cantidad de cadena fondeada que se haya previsto.
Se ordena frenar la salida de cadena, manteniendo informado al capitán del comportamiento de esta, hasta que la nave tome su posición final respecto de la resultante de los vectores de viento y corriente.
Se debe permanecer atento a posibles órdenes, sólo se da por finalizada la maniobra hasta que el capitán lo indique expresamente, posteriormente se ordena apretar el freno, encapillar el barboten y dejar la cadena lista para virar, colocar trincas de mar (estopor, bozas, etc.) y aclarar el castillo.
Funciones del contramaestre
El contramaestre destrinca las anclas, preparándolas para fondear, verificando que todo el recorrido de la cadena esté claro y libre de obstáculos y verifica el funcionamiento del cabrestante.
Ayuda al oficial de proa en la faena de anclas y en la instrucción de los marinos.
Maneja el volante del freno el que abrirá cuando el oficial ordene fondo.
De acuerdo con lo que indique el oficial irá cerrando o abriendo el freno para regular la tensión de la cadena que vaya saliendo, avisando al oficial si la salida o la tensión de la cadena son excesivas.
Finalizada la maniobra dejará la cadena frenada y lista para virar, la otra ancla lista a fondear, si es que hubiera. Dirección y fuerza que llama la cadena.
Longitud de cadena a fondear
La longitud requerida a fondear para lograr un buen trabajo del ancla depende de muchos factores, tales como la calidad del tenedero, el tiempo de estancia, condiciones hidrometeoro lógicas, características estructurales de la cadena y el ancla, espacio de borneo y la profundidad del lugar.
Por lo demás cabe señalar que el ancla trabaja con su máxima eficiencia cuando la cadena, ejerce sobre ella, una tracción horizontal. Si por filarse insuficiente longitud de cadena, no se logra tal propósito, el ancla perderá mucho de su poder de agarre.
Obviamente disminuye la resistencia a la tracción en función de la inclinación que la cadena forma con el arganeo.
Con un ángulo de inclinación 0º 5º 10º 15º % de resistencia a la tracción 100% 80% 60% 40% Basta que la cadena forme un ángulo de 15º con el fondo, para que la resistencia a la tracción disminuya en más de la mitad. Este dato es importante para prever lo que pueda ocurrir cuando no sea posible filar suficiente cadena como para lograr que la misma trabaje horizontalmente.
Existen variados criterios para determinar la cantidad de cadena a filar, algunos de estos tan simples o prácticos usados durante muchos años como dar de 3 a 4 veces el fondo (sonda). Sin embargo, en la actualidad, surgen criterios más técnicos que consideran la naturaleza y resistencia de los aceros empleados, donde se ha llegado a la fabricación de aceros más livianos, resistentes y de diversas aleaciones, en comparación con los usados en décadas pasadas fabricados de aceros normales y pesados. De ahí es que se ha perdido gran parte de la eficiencia que era proporcionada por el peso unitario de la cadena, que de alguna manera debe ser compensado por un mayor largo de cadena filada.
Si bien existen variados métodos para el cálculo del número de grilletes, lo usual y mínimo para fondear, es duplicar la raíz de la profundidad medida en brazas. Es aconsejable aumentar por lo menos en uno o dos paños, a modo de precaución, más aún, si el fondeo se realiza con malas condiciones de tiempo. Con vientos o corrientes muy fuertes, se recomienda fondear más cadena.
Si se ha fondeado con un ancla y se decide fondear la segunda ancla después de un aviso de mal tiempo, se debe virar la primera hasta dejar aproximadamente un grillete en el fondo, posteriormente cerrar la caña hacia la banda de la segunda para separar esta ancla de la cadena de la primera, fondear en la posición deseada hasta un paño en el fondo y luego arriar o filar en forma pareja, verificando el trabajo de ambas.
Dos anclas por la proa con distinta longitud
Este tipo de fondeo se emplea para disminuir el borneo excesivo del buque, consiste en fondear la primera ancla en forma normal de acuerdo al número de paños según la profundidad, a continuación, se fondea la segunda con una pequeña longitud de cadena, no más de un grillete en el fondo, a objeto de que el ancla no se sujete al fondo y asegurar así su garreo que actúa a modo de amortiguador,
La escasa tensión de la segunda cadena evitara el contacto con la principal disminuyendo el riesgo de una posible cruzada entre ambas. Está claro que esta maniobra es empleada como la anterior para condiciones de mal tiempo, sobre todo en zonas donde las condiciones climáticas son muy variables, por lo que en caso que disminuya el viento y/o el borneo, lo más probable es que ambas cadenas tiendan a aflojar, si ambas cadenas se encuentran flojas es recomendable dar un poco de máquina atrás para verificar que ambas estén claras, y proceder a virar la de corta longitud, adelantando así un paso para la maniobra de zarpe.
Fondeo a barbas de gato
Esta maniobra consiste en fondear las dos anclas abiertas por las amuras, a modo de formar un ángulo entre ellas de entre 90° y 120° y con la misma longitud de cadena.
Tal abertura entre las cadenas viene impuesta para garantizar la retención necesaria para variaciones de tiempo previstas de 45° a 60° a cada banda de la proa seleccionada. El procedimiento se realiza de la siguiente forma:
1. Para fondear a barbas de gato el buque se aproxima avante despacio (velocidad mínima de gobierno), al primer punto de fondeo con rumbo perpendicular al viento o la corriente cuando esta exista. Se debe tomar en cuenta el abatimiento y deriva, y que la posición de la proa será similar al rumbo, dependiendo de su intensidad.
2. Al llegar al lugar del fondeadero se da fondo ancla de barlovento.
3. Se fila cadena a una velocidad no superior a la que lleve el buque, a objeto de evitar acumulación en el fondo, hasta llegar al segundo punto de fondeo. Es importante que al principio la primera no trabaje para evitar la caída de la proa a esa banda.
4. Parar la máquina, caer hacia el viento cerrando la caña hacia la banda que se fondeo la primera y aguantando con el ancla, esperar el término de la virada y detener casi completamente la salida de cadena con el freno del cabrestante. Longitud Normal de Fondeo > = 1 grillete en el Fondo
Dos por la proa con distinta longitud
En el segundo punto de fondeo se da fondo ancla de sotavento, para lo cual se ha filado de la primera cadena al doble del número de grilletes con que se desea fondear menos uno.
Arriar cadena de esta segunda ancla a una velocidad similar a la cual se vira la primera mientras la embarcación se desplaza hacia popa, aproada al viento, para que ambas cadenas queden igualadas. Si es necesario se puede dar una ligera arrancada atrás con la ayuda de las máquinas.
Al observar un número similar de eslabones en cada escobén, se detiene el movimiento de cadenas. Mientras más parecido sea el número de ellos, menor habrá sido el embancamiento de cada una de las cadenas, y los fondeos se encontrarán relativamente equidistantes.
Filar ambas cadenas en forma pareja empleando parcialmente los frenos (pinchando), de manera que cada una de ellas quede trabajando hacia su respectiva ancla, hasta quedar en posición final, ya sea solo con la fuerza del viento o con apoyo de las máquinas.
Si se requiere, además, fondear anclas por popa, esta maniobra puede efectuarse con ayuda de un remolcador abarloado. En este último caso puede considerarse la posibilidad de utilizar boyas y orinques en cada ancla a fin de facilitar la señalización y posterior remoción de las anclas del fondo en la faena de zarpe.
Fondeo de llenante y vaciante
Esta maniobra se realiza en canales o ríos donde hayan mareas, es decir, exista una corriente de flujo y otra de reflujo, también es aplicable en lugares donde el buque deba limitarse ante la presencia de obstáculos muy próximos que representen algún peligro durante el borneo, aproximación al punto de fondeo fila cadena fondo ancla sotavento fondo ancla barlovento VIENTO encapilla y vira 1er. ancla y se fila la 2da. 60º
Fondeo a barbas de gato
Es recomendable dirigirse al lugar proa a la corriente ya que facilita la maniobra inicial, por lo que no es necesario esperar la estoa. Al llegar el buque al punto de fondeo se da fondo a una de las dos anclas, se para la máquina y el buque irá para atrás por efecto de la corriente, se fila cadena a una velocidad no superior a la de caída, con un número suficiente de grilletes, se hará trabajar un poco el ancla para que se clave en fondo y luego se va filando cadena a medida que vaya pidiendo, si fuese necesario se darán unas paladas avante para contrarrestar el efecto de la corriente. Una vez filado el doble de distancia de los que se quieren, se da fondo a la segunda ancla.
Una vez fondeada esta se encapilla la primera y se comienza a virar, mientras se va filando lo que pida la segunda, si es necesario usar la máquina, cuando se tenga un número igual de paños fondeados en cada ancla, se frenan ambas cadenas y se hace firme todo. El borneo que se produce es mínimo, ya que solo mueve la proa en cada cambio de corriente. Al producirse la estoa (comienza el cambio de dirección de la corriente), o en las cercanías de esta se procede a invertir las tensiones virando la segunda y lascando la primera cadena con la precaución de evitar sobretensiones.
Maniobra de zarpe (levar anclas)
Al recibirse la orden impartida desde el puente, el oficial a cargo comenzará a virar. Antes y durante toda la maniobra de virado mantendrá informado al capitán cada vez que se tenga un grillete en cubierta, con un golpe de campana de existir, además de la dirección con que llama la cadena y si hace fuerza o no.
A medida que se vaya virando, el buque avanza en busca del ancla. Si la tensión que hace la cadena es muy grande, se puede ayudar con la máquina y timón dando algunas paladas avante, cuidando no sobrepasar la posición en que este fondeada el ancla, caso en que quedará llamando por la popa.
Se deja de virar para evitar que los eslabones sean pasados con fuerza sobre la roda o el escoben, lo cual puede ocasionar que la cadena se rompa o deforme y que el cabrestante sufra esfuerzos indebidos.
Zarpe de Fondeo de llenante y vaciante.
Se comienza a virar de nuevo hasta que vuelva a llamar por la proa, únicamente si el buque no retrocediera se darán una palada atrás. En caso que la cadena trabaje cruzada a la otra banda se para de virar, se coloca timón y se espera para hacer que el buque bornee y la cadena llame libremente.
Cuando la longitud de la cadena fondeada se aproxima a la profundidad del lugar llamará en forma vertical. El oficial a cargo de la maniobra avisará entonces que está "a pique".
Cuando el ancla despegue del fondo comunicará al puente tal condición. Una vez el ancla aflore se indica si es que viene clara, enredada, etc., permaneciendo atento a cualquier medida que adopte el capitán, para finalmente tragar el ancla en el escoben. Una vez alojada el ancla en el escoben y habiendo recibido desde el puente la orden de trincar, se cierra el freno, se cierra el estopor, se colocan las bozas, se ajusta la mordaza, se colocan las tapas del escoben y gatera etc.
Maniobras de zarpe en fondeos con dos anclas
De tratarse de un buque fondeado con dos anclas, la regla general es levar primero el ancla que no trabaja, filando de la otra si es necesario. Cabe mencionar que, en el zarpe, si las cadenas toman demasiada tensión, unas paladas avante alivianaran la tensión facilitando la maniobra.
Zarpe de dos anclas por la proa fondeadas casi simultáneamente
La maniobra de zarpe en un fondeo de este tipo, se realiza virando las dos anclas al mismo tiempo, hasta tenerlas a pique, se frena la que más trabaje y se desencapilla, virando la otra hasta tenerla arriba clara y tragada en la escobén. Por último, se vira la que queda hasta repetir el procedimiento anterior.
Zarpe de llenante y vaciante
Para el zarpe de un fondeo a la llenante y vaciante, es conveniente esperar la estoa o que las corrientes no sean muy fuertes. Se comienza virando el ancla que no trabaje, mientras se fila de la otra, a una velocidad no superior a la que tenga el buque, lo que sea necesario hasta tener arriba clara y tragada la primera ancla, luego se vira de la que queda haciendo lo mismo.
Zarpe de A barbas de gato
El zarpe correspondiente a este tipo de fondeo se realiza tomando en cuenta las precauciones del procedimiento de la maniobra de fondeo, y considerando el mismo viento predominante, lo normal es ejecutarla de la siguiente manera:
1. Se viran despacio ambas cadenas hasta conseguir un ángulo entre ellas de unos 140° o 150°, como máximo ya que un ángulo mayor entre ellas puede producir una tensión excesiva.
2. Habiendo verificado el espacio de libre borneo en el perímetro correspondiente al ancla de barlovento en la maniobra de entrada, se procede a filar la respectiva cadena a una velocidad no superior a la de traslación que se produce al virar la segunda ancla, de sotavento en la maniobra de entrada, hasta tenerla arriba clara y tragada en el escoben.
3. Se comienza a virar el ancla de barlovento, tomando en cuenta que la embarcación sufrirá un movimiento relativamente brusco antes de depender del ancla restante, por lo que es aconsejable virar con precaución, a modo de combinar la reducción paulatina del número de paños con el desembancamiento del seno de la cadena.
Radio De Borneo
Una vez que el buque ha fondeado, se dice que está a la gira, o al ancla, en esta condición el ancla trabaja en el fondo y el buque comienza a aproarse en dirección de la resultante de las fuerzas externas que influyen sobre él (viento, corriente, olas), llegando a su posición final, que será variable dependiendo de los cambios de dirección e intensidad de los agentes externos.
Se asume entonces que los agentes externos pueden variar en todas direcciones, por lo que se deduce que el buque puede tomar todas las direcciones de la rosa de los vientos.
UNIDAD 5:
REMOLQUES
Empleo de remolcadores. Remolque de mar y oceánico. Sus componentes. Tipos de remolques y resistencias. Longitud del remolque y velocidad. Dar y tomar remolque. Remolques con mal tiempo. Remolques de puertos. Capacidad de tiro de un remolcador. Remolque por empuje. Conjunto remolcador – barcaza acoplados por sistemas no rígido o rígidos. Ventajas y desventajas. Ancla de capa. Su uso.
REMOLQUE
En Derecho Marítimo se considera como tal, la operación por la que un buque transporta mediante su arrastre por agua, a otro buque o aparato flotante que carece de autopropulsión, o que poseyéndola no está en condiciones de navegar por sus propios medios.
Atendiendo al tipo de operación y a la misión a realizar por el remolcador, se pueden dividir en: remolcadores de puerto, remolcadores de puerto y altura y remolcadores de altura y salvamento, aunque también pueden existir remolcadores que realicen los tres tipos de operaciones.
El servicio de remolque portuario es aquel cuyo objeto es la operación náutica de ayuda a los movimientos de un buque, siguiendo las instrucciones del capitán del buque, denominado remolcado, mediante el auxilio de otro u otros buques, denominados remolcadores, que proporcionan su fuerza motriz.
Funciones de un remolcador son las siguientes:
- Asistir a un buque con maniobrabilidad reducida en las maniobras de atraque y desatraque. - Ayudar a un buque en el reviro en un espacio limitado.
- Compensar los efectos del viento y oleaje al que puede verse sometido un buque durante una maniobra. - Ayudar a parar el buque más rápidamente.
- Remolcar, empujar o auxiliar a un buque que por la causa que fuere carece de propulsión y gobierno.
- Transportar por el mar a un buque o artefacto flotante.
- Dar escolta a buques con mercancías peligrosas en áreas de alto riesgo.
Breve Historia del Remolcador.
Desde la época de los buques de vela ya fue necesario buscar la figura de un buque auxiliar que lo ayudara en las maniobras debido su poca maniobrabilidad. En este momento es donde aparece la figura del remolcador, que en esta época se trataba de pequeños botes a remos, que proporcionaban una ayuda a dichos buques para poderlos maniobrar en zonas de abrigo. Los barcos fueron ganando importancia debido a que gran parte del comercio mundial se realizaba por mar, apareciendo importantes rutas comerciales en la Europa Mediterránea, África, Asia y América.
Equipamiento de los Remolcadores. Cada tipo de remolcador irá equipado con los elementos necesarios para desarrollar con normalidad su trabajo. Por un lado, tenemos los que van fijados en cubierta tales como: chigre de remolque, gancho de remolque, bitas en “H” y bitas normales; y por otro lado, tenemos los que formarán el material necesario para dar el remolque como: cable de remolque, pies de gallo, triángulo, cable de seguridad, cabos mensajeros y guías. Por lo tanto, cada remolcador, según su potencia de tiro y tracción a punto fijo, deberá tener dichos elementos con la resistencia necesaria que permita efectuar el remolque con seguridad.
A continuación, vamos a describir brevemente los elementos nombrados anteriormente:
Chigre: máquina hidráulica prevista de uno o dos tambores donde se estiba el cable de remolque. El sistema puede ser automático de tensión o longitud constante, o no automático. Mantiene en todo momento la tensión de cabo de remolque en la tensión programada, desvirando cuando entra en máximos de tensión y virando cuando queda en banda. De esta manera, una vez fijada la longitud del cable del remolque o la tensión máxima, automáticamente se mantendrán estos valores. El chigre de remolque no automático es de accionamiento manual y requiere regular la distancia manualmente y estar atento a que no trabaje en exceso. El chigre de remolque debe instalarse lo más bajo posible para no disminuir la estabilidad y a ser posible coincidiendo con el centro de resistencia lateral para facilitar la maniobrabilidad del remolcador. La desventaja del chigre de remolque es que no es posible pasar de la situación de remolque hacia adelante a hacia atrás, especialmente en maniobras en lugares estrechos.
Cabrestante: En los remolcadores que no están equipados con una maquinaria especialmente dotada para remolcar, se instala un cabrestante como medio principalmente para cobrar o virar las estachas o cabos de remolque, aunque de igual manera también se instalan en remolcadores dotados de maquinaria para remolcar ya que es un elemento de suma utilidad mientras se está faenando. Un cabrestante sirve para lo mismo y tiene la misma finalidad que una maquinilla o chigre no automático, y su diferencia radica en que la estacha o cabo de remolque actúa solo sin colocarlo en ningún tambor.
Gancho de remolque: gancho de construcción especial que permite zafar el cable de remolque automáticamente desde el puente. La situación del gancho debe ser coincidiendo con el centro de resistencia lateral o algo hacia popa del mismo, dependiendo del sistema propulsor, con el fin de dar la máxima maniobrabilidad al remolcador. Su altura debe de ser Ia mínima 19 para evitar una pérdida de estabilidad del remolcador. Son usados mayoritariamente en los remolcadores convencionales ya que este tipo de remolcadores no dispone como los más modernos, de maquinillas o chigres que soporten el tiro desarrollado por el remolcador, es por ello que hay que usar el gancho de remolque, elemento que sí soporta el esfuerzo requerido.
Bita: estructura metálica de forma cilíndrica bien asegurada a la estructura y repartidas en diferentes puntos del remolcador, donde se puede hacer firme el cabo de remolque o afirmar los cabos de atraque. Como acabamos de mencionar, en cubierta deber haber las suficientes bitas para hacer firmes los cabos de remolque y colocadas en los lugares apropiados para ser usadas en diversos tipos de remolques, ya sea por la popa, por la proa o abarloado.
Cabo de remolque: El cabo de remolque es el elemento principal en la maniobra. Es el elemento con el que el remolcador “conecta” con el otro buque o artefacto flotante y por el cual el remolcador puede ejercer una determinada fuerza de tiro para realizar la maniobra necesaria. Para las maniobras dentro de puerto, ya sea tanto en el atraque o desatraque de un buque, como para traslados de otros artefactos como pontonas, gabarras, etc., el cabo es el elemento más usado a diferencia del alambre de remolque ya que es mucho más ligero y por tanto más manejable. El material del cabo suele ser o de fibra natural o de fibras sintéticas como el nailon, polipropileno, polyester, etc. En los remolcadores convencionales, al no equipar chigre, la longitud del cabo no se puede variar a voluntad, se tienen que estudiar el tipo de barco y maniobras que se van a realizar, y establecer 2 medidas que sean apropiadas para dichas maniobras.
En los remolcadores modernos, el cabo es una pieza comprendida normalmente entre 100 y 200 m. de longitud con un diámetro de 60 a 80 mm. y material de poliéster. Debido tanto a las imperfecciones provocadas por el óxido en las gateras y regalas de los buques, como algunos filos del casco o zonas donde pueda rozar el cabo, se suele ayustar otro cabo de casi idénticas características pero en torno a 20 m. de longitud, para que sea este tramo el que debido a los roces en las maniobras, se lleve todo el deterioro, intentando que el cabo principal sufra lo menos posible para evitar mayores gastos económicos ya que por cuestiones evidentes no es lo mismo reemplazar un cabo principal con una longitud de 100 m. a otro de 20 m..
Alambre de remolque: El alambre de remolque se emplea para remolques largos, costeros y oceánicos, en los cuales se requiere mucha longitud y gran resistencia. Éste puede ser de 5 a 6 cm de diámetro y de más de 600 m de longitud y va enrollado en el tambor del chigre de remolque. El motivo por el que se requiere una gran longitud de remolque es debido a que cuanto mayor sea la distancia entre remolcador y remolcado, más se aprovechará la potencia de tiro del remolcador, reduciendo el esfuerzo aplicado sobre el cable y menos influirá el aguaje de los propulsores del propio remolcador, que también es un factor que hay que tener en cuenta para desarrollar con mayor eficacia el remolque.
Estibador: Se trata de un elemento situado en la maquinilla o chigre donde va alojado el alambre de remolque, y su función radica en ir caminando a lo largo de un eje horizontal fuera del tambor de la maquinilla para ir guiando y estibando el cable correctamente en el tambor, debido a que si no se estiba correctamente, es muy probable que cuando se vaya a arriar el alambre, coja vueltas y termine por enredarse en la propia maquinilla pudiendo causar una avería o complicar la maniobra de remolque.
Trapa: Cuando se está haciendo un remolque, es de vital importancia evitar todas las situaciones que desemboquen en que el tiro del remolque sea de través ya que comprometería gravemente la estabilidad del remolcador, por ese motivo es importante situar un elemento a popa del remolcador con el fin de situar el tiro de remolque en la popa y no al través. En los remolcadores modernos la trapa es hidráulica, compuesta por dos pines con forma cilíndrica, y en la parte superior, una tapa con forma de gota de agua en cada una, de modo que, al ir subiendo de su posición, van girando lentamente hasta que ambas tapas de los dos cilindros coinciden, formando una especie de arco por donde pasa el remolque. Por otra parte, también algunos remolcadores equipan una trapa fija, consistente en una abertura en la cubierta, donde hay una estructura, normalmente un cilindro transversal, al que se le pasa una cadena por la estructura y por el remolque, limitando el movimiento en popa de éste; o incluso un semiarco o cáncamo reforzado como en la. Y, por último, otra forma de conseguir que el tiro de remolque sea en la misma popa, es por medio de una “abertura” en la popa por donde pasa el cable, quedando limitado su tiro a ese punto.
Grilletes: Son el elemento principal para unir todo tipo cabos y cables o alambres en el tren de remolque. Se trata de una pieza de acero o de hierro, normalmente en forma semicircular o de U, con sus extremos unidos por un perno.
Triángulo de Remolque: Es la pieza encargada de unir por medio de grilletes los Pies de Gallo con el cable del remolque principal. Se trata de una pieza muy resistente pero también de mucho peso. Al igual que los grilletes y demás elementos de remolque, tiene que tener una certificación de carga de rotura, para saber cuántas toneladas de tiro es capaz de soportar.
Luces y señales de Navegación: El remolcador está sujeto al reglamento de buques de propulsión mecánica pero el supuesto cambia cuando empieza la faena de remolque. Para este punto, hay que aclarar que la longitud de remolque se mide desde la popa del remolcador hasta la popa del último artefacto flotante que vaya remolcado. Debido a la variedad de tipos y formas de remolques, hay varios casos en la utilización de las luces de remolque.
A continuación, vamos a explicarlos:
Cuando un buque de propulsión mecánica remolca a otro: - Dos luces de tope en línea vertical. Cuando la longitud del remolque, medido desde la popa del buque que remolca hasta el extremo de popa del remolque, sea superior a 200 metros, exhibirá tres luces de tope a proa, según una línea vertical. - Luces de costado. - Una luz de alcance. - Una luz de remolque en línea vertical y por encima de la luz de 25 alcance. - Una marca bicónica en el lugar más visible cuando la longitud del remolque sea superior a 200 metros.
Cuando un buque que empuje y un buque empujado estén unidos mediante una conexión rígida formando una unidad compuesta, serán considerados como un buque de propulsión mecánica y exhibirán las luces propias de un buque a propulsión mecánica.
Todo buque de propulsión mecánica que empuje hacia proa o remolque por el costado exhibirá, salvo en el caso de constituir una unidad compuesta: - Dos luces de tope en una línea vertical. - Luces de costado; - Una luz de alcance.
Los buques de propulsión mecánica a los que sean de aplicación los párrafos 1 y 2 anteriores, también deberán de exhibir: - Una segunda luz de tope, a popa y más alta que la de proa, exceptuando a los buques de menos de 50 metros de eslora, que no tendrán obligación de exhibir esta segunda luz, aunque podrán hacerlo.
Todo buque u objeto remolcado, poco visible y parcialmente sumergido y toda combinación de buques u objetos en los que se den esas mismas circunstancias, exhibirán: - Cuando su anchura sea inferior a 25 metros, una luz blanca todo horizonte en el extremo de proa o cerca de éste y otra en el extremo de popa o cerca de éste. - Cuando su anchura sea igual o superior a 25 metros, dos luces blancas todo horizonte adicional en los puntos extremos de esa anchura o cerca de éstos. - Cuando su longitud sea superior a 100 metros, luces blancas todo horizonte adicional de modo que la distancia entre luces no exceda de 100 metros. - Una marca bicónica en el extremo popel del último buque u objeto remolcado o cerca de ese extremo, y cuando la longitud del remolque sea superior a 200 metros, una marca bicónica adicional en el lugar más visible y tan cerca como sea posible del extremo proel.
Señal Bicónica de remolque
Teniendo en cuenta que cualquiera que sea el número de buques que se remolquen por el costado o empujen en un grupo, habrán de iluminarse como si fueran un solo buque.
Cuando, por alguna causa justificada, no sea posible que el buque u objeto remolcado exhiba las luces o marcas prescritas en los supuestos anteriores, se tomarán todas las medidas posibles para iluminar el buque u objeto remolcado, o para indicar al menos la presencia de dicho buque u objeto. Además de estos supuestos anteriores, por la naturaleza de la faena de remolque, estamos tratando un caso de maniobra restringida debido a que llevamos un remolque por la popa, generalmente se llevará una velocidad bastante reducida, y dependiendo en la zona que se realice la navegación, tendremos nuestra maniobra evidentemente limitada, por ese motivo también es necesario exhibir adicionalmente a los supuestos anteriores, tres luces todo horizonte dispuestas en vertical de las cuales la más elevada y la mas baja serán rojas, y la de en medio blanca.
Cintón o defensa: La mayoría de los remolcadores van dotados de un cintón o defensa, normalmente de caucho, alrededor del mismo siguiendo la cubierta principal y la de castillo además de varias defensas, normalmente cubiertas de camiones o tractores, colocadas vertical u horizontalmente en la zona de proa, amuras y aletas, además de algún otro sitio intermedio donde, por el tipo de maniobra, sea necesario poner alguna defensa para evitar que el remolcador y remolcado choquen.
Alumbrado de Cubierta: Este tipo de buques desempeñan su función las 24 horas del día, de modo que es necesario disponer de un buen alumbrado en la cubierta que permita a la tripulación faenar con la máxima claridad. Por ello se instalan focos muy potentes colocados e instalados en puntos clave de modo que todas las zonas de cubierta estén bien iluminadas.
Luces Maniobra Restringida: También es común que estén dotados en la toldilla del puente, de uno o varios focos orientables accionados mediante un mecanismo desde el propio puente con la finalidad de iluminar el objeto remolcado en caso de estar de remolque, o para labores de búsqueda y rescate.
Equipo contraincendios: resulta habitual que muchos remolcadores se encuentren equipados por medio de equipos contraincendios, en aras de dar cumplimiento a sus obligaciones en materia de cooperación ante emergencias con las Autoridades Portuarias. [Las características y requerimientos de estos equipos, vienen reguladas por medio de las disposiciones publicadas por diferentes sociedades clasificadoras, las cuales indican qué capacidades han de tener estos equipos para poder ser clasificados dentro de las diferentes tipologías de sistemas existentes (categorías Fire Fighting o Fi-Fi).
2. Los remolcadores
Introducción. Una vez hecha la introducción sobre el sistema de propulsión azimutal, haremos una breve descripción de los buques que más utilizan este tipo de propulsión para aprovechar la gran maniobrabilidad ofrecida por este sistema: los remolcadores. La operación de remolque de un buque se hace normalmente por medio de otro buque construido específicamente para este servicio, que recibe el nombre de remolcador.
Maniobra de remolque
El uso de remolcadores, tanto en la mar como en puerto, se extiende día a día por las indudables ventajas que su empleo tiene en relación al traslado de un buque averiado desde un puerto a otro, así como por la mayor seguridad y rapidez que facilitan para las maniobras en puerto. En alta mar, en caso de colisión o avería, un remolcador puede ser requerido para prestar auxilio a otro buque en dificultades y conducirlo hasta un lugar seguro.
En aguas interiores, el gran tamaño que han alcanzado los buques, así como la dificultad de reducirles la arrancada cuando se mueven en espacio reducido; la maniobra de conducirlos a dique; el movimiento en el interior de las dársenas, que siempre resultan pequeñas; el atravesar una esclusa; todo ello, en fin, aconseja el empleo de remolcadores como ayuda indispensable y práctica que reduce el riesgo de accidentes y averías. Hoy en día, existen compañías comerciales dedicadas exclusivamente a las operaciones de remolque y salvamento que cuentan con remolcadores de gran potencia de arrastre que llevan instalados sistemas contraincendios.
Los remolcadores de salvamento se encuentran situados en los puntos estratégicos de las rutas comerciales y su misión es única y exclusivamente la de salir en ayuda de los buques en apuros que soliciten el servicio, o para rescatar buques que sean abandonados por sus tripulantes. Para operaciones de esta naturaleza se emplean unos contratos tipo que conocen todos los armadores y de esta forma se gana tiempo en la contratación al no ser necesaria la discusión de las condiciones en que se contrata. Es corriente emplear en este tipo de operaciones la fórmula “No Cure, No Pay”. Esto quiere decir que si no se lleva a término la operación y el buque se pierde, el que intenta el salvamento no percibe ninguna cantidad.
A continuación, y para abreviar un poco se procederá a clasificar los remolcadores de dos formas bien diferenciadas pero que están claramente interrelacionadas. Esta clasificación atenderá a la clase de maniobra que realizan y a su tipo de propulsión.
Remolcadores por su tipo de maniobra.
Aunque la principal misión de un remolcador es en principio producir fuerza, denominada según el caso tracción o empuje, estos buques pueden desempeñar otros muchos servicios. A continuación, se detallarán algunos de ellos, sin olvidarnos del propio trabajo de remolque, tanto en altura como en puerto. 16
Remolcadores de altura
Los remolcadores de altura son embarcaciones proyectadas para efectuar maniobras de remolque de buques o artefactos flotantes en aguas abiertas. También puede estar involucrado en entradas y salidas de puerto de buques, pero este será un segundo trabajo para este tipo de buque. Los principios en los que se basa el remolque en alta mar son sencillos. El remolcador arrastra por su popa mediante un cabo o cable al buque remolcado; una vez alcanzada la velocidad de marcha, el buque remolcado ofrece una resistencia al movimiento de avance que debe ser contrarrestada por la potencia suministrada por el remolcador. En los buques se instalan tanto en proa como en popa unas bitas de remolque para que, dado el caso de que el buque pueda ser remolcado (bitas de proa) o dar un remolque (bitas de popa) se pueda hacer firme el cabo de remolque. Las bitas de remolque se calculan en función de la carga de rotura del cabo de remolque que debe llevar todo buque que tenga un numeral de equipo inferior a 5800. En principio, es preferible hacer la operación de remolque con el cabo del buque remolcado y no del remolcador. De esta forma se sabe que los medios donde se hace firme el cabo aguantarán correctamente la tensión del cabo y se romperá antes de que se arranquen las bitas de remolque.
Los remolcadores de altura deben cumplir con una serie de requisitos que garanticen su plena operatividad en cualquier condición de remolque y de la mar:
· Necesidad de una elevada autonomía. Tanto la cámara de máquinas como la habilitación han de diseñarse para largos trayectos.
· Maquinaria de cubierta adecuada a las labores de remolque para las que va destinado. · Manga elevada y amplia cubierta de popa con un francobordo reducido, a fin de que la maniobra de remolque no afecte negativamente a la estabilidad del buque.
· Zonas de popa con formas y/o asiento, a fin de albergar hélices del mayor tamaño posible, y disposición de un quillote cuya finalidad será aumentar el área lateral de la carena a fin de mejorar la estabilidad de ruta.
· Presencia de defensas de goma y cintón en toda la traca de cinta, así como de escudo de empuje a proa para facilitar las operaciones de carnero.
· Suelen proyectarse con un alto castillo de proa.
· Puente con la mayor visibilidad posible, y si fuese posible todo horizonte. Los buques de apoyo a plataformas petrolíferas offshore o supplys tienen en principio una concepción similar a la de un remolcador de altura, pero están dotados de unos servicios muy distintos a los de cualquier otro buque, debido a los requerimientos específicos de dichas plataformas. Por ejemplo, deben disponer de tanques de cemento, campanas de buceo y sistemas de posicionamiento dinámico, y suelen contar con una cubierta de vuelo para helicópteros.
Remolcadores costeros y de puerto
El uso de remolcadores para ayudar a la maniobra de los buques en puerto es obligado en muchos casos y está ampliamente extendido. El manejo en espacios reducidos de grandes buques con su considerable cantidad de movimiento e inercia hace ineludible el auxilio de remolcadores de puerto. A ello se añade que tanto buques como muelles tienen zonas vulnerables a las que un pequeño choque puede ocasionar daños de consideración. Por ello, el uso de remolcadores cuando la situación lo requiera, añade seguridad y rapidez a la maniobra. 18 Los remolcadores son elementos adicionales de la maniobra, y como tales deben usarse en combinación con el propulsor, timón, amarras, ancla y, en caso de existir, la hélice de maniobra de proa del buque remolcado.
Remolcadores de lucha contraincendios.
Una de las más importantes misiones del remolcador de hoy en día es la de asistir a buques incendiados, para lo cual se debe dotar al buque de monitores situados en la parte más alta del mismo con objeto de que su chorro logre el mayor alcance y altura posible.
Esta capacidad influye en el buque en los siguientes aspectos:
· Necesidad de contar con un equipo contraincendios adecuado, incluyendo los medios de autoprotección para aproximarse al buque siniestrado.
· Necesidad de contar con bombas contraincendios de elevada potencia acopladas a los motores principales, aprovechando así la potencia de los motores al navegar a baja velocidad. Podrían también accionarse por los motores diesel auxiliares o por un motor especialmente dedicado, pero no es lo más corriente. Foto 10: monitores de agua instalados en un remolcador (
Para ello se emplean monitores de agua y espumógeno con tuberías diseñadas para estabilizar y dirigir correctamente el chorro de agua, convirtiendo el flujo turbulento en laminar, y capaces asimismo de introducir aire en la mezcla agua-espumógeno. Esto último se consigue mediante agujeros en la periferia del monitor, que actúan como inyectores de aire. A fin de proteger al propio buque para que se pueda acercar al buque socorrido, puede disponer de un sistema de pulverización o nebulización de agua alrededor de todas las superficies exteriores.
Remolcadores de lucha contra la contaminación
Remolcador de lucha contra la Dentro de este tipo de remolcadores existen dos grupos, según posean o no tanques de almacenamiento y concentración de vertidos. Los que están dotados de estos tanques, pueden también concentrar los residuos mediante barreras flotantes y exportar el efluente producido por el skimmer (el cual se trata de un elemento de recolección de hidrocarburos que según su diseño se pueden clasificar en varios grupos, que en nuestro caso no vamos a mencionar ya que no se trata de un elemento de estudio en este trabajo). Los remolcadores que por el contrario no llevan tanques de almacenamiento, están dotados de medios para el largado de barreras y rociadores de líquidos dispersantes o detergentes, y son capaces de moverse continuamente a baja velocidad en una amplia zona.
Remolcadores de salvamento y rescate.
Este tipo de remolcadores son capaces de, en el menor tiempo posible, presentarse en el lugar de un accidente y realizar el salvamento de las vidas que estuvieran en peligro. Para ello poseen gran velocidad en navegación libre y gran maniobrabilidad. Están dotados también de defensas para poder abarloarse a cualquier buque. Deben de llevar medios mecánicos de izado y una zona de acogida con un pequeño hospital y una zona de despegue de helicópteros.
Remolcadores por su tipo de propulsión.
Remolcadores de propulsión convencional.
Es un remolcador con una o más hélices convencionales accionadas por un eje rígido, y situadas a popa. Este tipo de remolcador, que constituyó el estándar hasta los años 50 del siglo pasado, ha evolucionado hacia la hélice en tobera para aumentar la efectividad de la misma (sobre todo cuando trabaja muy cargada). La mayoría de los remolcadores de este tipo emplean dos hélices, con el fin de aumentar la maniobrabilidad y la seguridad. Una variante en esta propulsión es el timón tobera, en la que esta puede girar sobre un eje vertical, aumentando considerablemente la capacidad de gobierno. La tobera Kort, consiste en una tobera dispuesta alrededor de la hélice para aumentar la velocidad del agua que se acerca al propulsor aumentando, de este modo, su rendimiento a la vez que se evita la formación de remolinos. Se denominan toberas Kort en honor al investigador alemán que en 1933 realizó una serie de estudios y experiencias encaminadas a demostrar sus ventajas en la propulsión naval. El chigre o gancho de remolque, del cual hablaremos más adelante, se sitúa en estos remolcadores a la mitad de la eslora. Este tipo de propulsión suele ser el más indicado para los remolcadores de altura, salvamento y buques de apoyo a plataformas offshore.
Remolcadores combinados.
Los remolcadores de propulsión combinada son buques de propulsión convencional a los que se ha incorporado, comúnmente a posteriori, una hélice azimutal en proa a fin de mejorar su capacidad de evolución. Esta hélice puede aumentar también el tiro a punto fijo entre 2 y 6 toneladas al orientarse hacia popa.
Remolcadores de propulsión cicloidal o tractores.
Remolcador con sistema Voith- Schneider
La introducción de la propulsión cicloidal por parte de la compañía Voith-Schneider supuso la introducción de un nuevo concepto en la propulsión de remolcadores, aunque también ha sido aplicada en otro tipo de buques, como cazaminas o ferries. La propulsión epicicloidal Voith-Schneider consta de palas verticales que giran sobre un eje también vertical y que permiten el desplazamiento del buque en todas las direcciones con gran facilidad. Este tipo de remolcador puede girar sobre sí mismo con gran facilidad. Las órbitas en las que giran las palas suelen ser de 3 metros, lo que implica que, en este tipo de remolcador la manga es mayor de lo habitual. También permite regular el ángulo de ataque de las palas durante el funcionamiento, por lo que este propulsor se comporta como uno de paso controlable. Además, puede variar la dirección de empuje y se comporta así como un elemento de gobierno, sustituyendo al timón. Dichos propulsores se montan habitualmente a proa y por ello estos remolcadores reciben el nombre de tractores, aunque también existen remolcadores con este tipo de propulsores instalados a popa en la zona de habitual colocación de hélices y timones. Los remolcadores en los que es más habitual la instalación de este tipo de propulsores es en los destinados a operar en puertos y canales, donde la mejora de maniobrabilidad que se obtiene compensa el menor rendimiento de esta tecnología frente a las hélices convencionales o en tobera. Las carenas varían notablemente respecto a las de los remolcadores convencionales, siendo prácticamente simétricas respecto a la maestra, y debido a las grandes posibilidades de maniobra, el buque puede navegar tanto avante como atrás con igual efectividad. Un inconveniente de este tipo de propulsores es su vulnerabilidad, así como su elevado coste.
Remolcadores tractores de propulsión azimutal
Este tipo de remolcador va dotado de dos hélices en tobera situadas a proa de la cuaderna maestra. Éstas pueden girar 360º sobre sí mismas. Aunque existen muchos fabricantes de propulsores azimutales, como bien quedó explicado en el capítulo anterior, todos tienen un funcionamiento similar, pero cada uno tiene su propio diseño.
Remolcador con hélices a proa
Remolcadores de propulsión azimutal por popa o ASD
Son el tipo de remolcadores más próximos a los remolcadores con hélice convencional, pero ésta se sustituye por una hélice montada en tobera, similar a las utilizadas en los tractores de propulsión azimutal ya comentados anteriormente, pero de mayor diámetro.
Remolcador ASD
Todos tienen dos hélices, y dado que cada una puede ser orientada con independencia, la maniobrabilidad aumenta notablemente pudiendo girar sobre sí mismo en una sola eslora. La única diferencia con los remolcadores convencionales son las modificaciones en las formas de popa y estructura para albergar los propulsores y soportar los esfuerzos del timón tobera y que son distintos a los ejercidos por un timón y un propulsor convencional. La mayor capacidad de maniobra frente a la misma capacidad de tiro y un muy escaso aumento de calado a popa hace que estos buques sean una buena alternativa a los remolcadores convencionales y es muy empleada en remolcadores de puerto con gran potencia. Ventajas de este tipo de remolcadores son su buen comportamiento navegando hacia atrás y la posibilidad de trabajar con tiro indirecto.
Elementos de remolque
Está formado fundamentalmente por la horquilla, el gancho de remolque y/o chigre, además de cables o cabos que según el tipo de remolque se puede emplear los siguientes tipos:
· Remolque de alambre o de acero, que es el que se usa en la mar llana.
· Cabos de manila que poseen una elasticidad y flotabilidad idóneas y son por tanto recomendables para remolques medianos.
· Cabos de fibra sintética, como los de propileno que son más usados que los de manila, y que son muy resistentes.
· Combinación de cadena-manila, ideales para remolques de tipo media.
· Combinación de cadena-cable, para barcos grandes ya que el peso de la cadena amortigua los estrechonazos.
· Combinación de cable- calabrotillo, usados para remolques en el puerto principalmente.
· Para los barcos pequeños (embarcaciones de recreo) el cabo de manila o de fibra sintética son los más recomendables.
En los remolcadores convencionales el cable de remolque suele moverse libremente sobre la cubierta orientándose de acuerdo con la posición relativa entre el remolque y el remolcador. Para ello se disponen en la cubierta de popa defensas tubulares en ambas bandas, sobre las que se desliza el cabo de remolque. Cuando el remolque es en alta mar, el cable pasa a través de las gateras, mientras que si es en puerto se deja libre. En los remolcadores tractores el cable o cabo de remolque, hace algunos años, pasaba a través de una horquilla en forma de “A”, que actualmente se ha sustituido por unos rodillos.
Partes de un remolcador, donde se aprecia la horquilla denominada pasador En los tractores, cuanto más a popa se instalen los rodillos, mayor es la fuerza de tracción disponible para el tiro indirecto, maniobra que consiste en colocar al remolcador perpendicular a la línea de remolque, generándose una fuerza de frenado por la pantalla que presenta el casco ante el agua, incrementada por tener en popa un gran quillote y en proa los propulsores. Cuanto mayor sea la longitud del remolque tanto más segura será la navegación, pues el peso del remolque hará una catenaria que amortiguará los estrechonazos entre el remolcador y remolcado. Se procurará que la longitud sea tal que los dos buques queden entre dos senos de las olas o encima de dos crestas simultáneamente. Se arriará un ramal de cadena en el remolcado y este peso será favorable al actuar como amortiguador. Otras veces el remolcador proporcionará unos pies de gallo al buque remolcado que consisten en dos ramales de cadena con contrete o cable, de igual longitud, que se pasan por las gateras de las amuras o por los escobenes y se hacen firmes en el castillo en varios puntos. Ambos ramales se engrilletan a un triángulo de hierro al que se engrilletará la estacha intermedia. Deberán emplearse pies de gallo de cadena en los remolques de altura precisamente porque debido a su gran peso forman una catenaria que hace de muelle o amortiguador en los estrechonazos entre remolcador y remolcado debido al oleaje. Engrilletado al triángulo del pie de gallo va la estacha intermedia o comba y luego, a continuación, el cable de remolque, que puede afirmarse a bordo del remolcador en el tambor del chigre de remolque de tensión constante, o bien al gancho de remolque de desenganche automático. El conjunto de cable de remolque, pie de gallo, grilletes y gancho debe ser de la suficiente resistencia para poder soportar la enorme tensión que se crea en los remolques oceánicos con mal tiempo. 28 Otro elemento importante es el cable de seguridad, que tiene la misma forma que el pie de gallo y sirve para no perder el remolque en caso de rotura del pie de gallo principal. Va adujado a un costado del remolcado y bien trincado. El chicote lleva un boyarín. La estacha intermedia, cable intermedio o comba, consiste en un ramal de cadena, alambre o cabo de fibra sintética que se intercala entre el pie de gallo y el cable de remolque. La finalidad es dar elasticidad al conjunto del remolque y así evitar estrechonazos que puedan llegar a partir el remolque. En los remolques costeros esta estacha intermedia generalmente es de fibra sintética para evitar un excesivo peso del remolque y, por consiguiente, la formación de una gran catenaria que puede ser peligrosa navegando cerca de la costa en aguas poco profundas. Si navegando en estas condiciones, el remolque tocara en el fondo o que el remolque quedara completamente vertical, frenando el avance del remolcador, mientras que el remolcado, que sigue a velocidad constante, se le echaría encima con peligro de abordaje y hundirlo. Cuando se sospeche una excesiva catenaria se deberá cobrar cable de remolque enseguida o bien aumentar la velocidad. Cuando el cable toca en el fondo o cuando el cable queda completamente a pique por la popa del remolcador, quedando éste prácticamente fondeado, se dice que el remolcador está “en hierros”. El gancho de remolque de los remolcadores convencionales tiene movimiento vertical y gira de banda a banda sobre una guía semicircular. En los tractores va situado a proa de los rodillos. En ambos casos se dispone de un sistema de disparo, normalmente neumático, con accionamiento local a ambas bandas y remoto desde el puente. Adicionalmente se instala un sistema de disparo automático en caso de emergencia, cuando se alcanza bruscamente un determinado ángulo de escora o cuando se produce una escora lenta pero progresiva del remolcador.
Gancho de remolque
El chigre de remolque situado en la línea central en las proximidades del gancho, maneja el cable de remolque. Suele ser de accionamiento hidráulico y se maniobra localmente desde el puente. En este caso, en el puente se instala un pupitre de control de la velocidad y de la tensión en la línea de remolque y de control del sistema de frenado, de embragues, así como indicadores de longitud de cable extendido, etc. La maquinilla o chigre de remolque se dispone con estibador automático, que es una guía móvil que, desplazándose a lo largo del eje de la maquinilla, ordena el cable en el tambor en sucesivas capas bien dispuestas, evitando que cada capa del cable se entremezcle con las anteriores y posteriores.
Catenaria del remolque
Ya se ha dicho anteriormente que es necesario que el remolque tenga un cierto peso para que forme una catenaria que sirva para amortiguar los estrechonazos por las sobrecargas producidas por el movimiento entre las olas. Sin embargo, tampoco debe ser excesivo el peso porque va a absorber potencia del remolcador y porque podría aumentar la catenaria del remolque hasta que éste tocara en el fondo, dejándolo “enrocado” o “en hierro”, o sea, fondeado con el peligro inminente de que el remolcado se le eche encima si no tiene tiempo de largar el remolque.
El remolcado puede acercarse, e incluso abordar, al remolcador por diversas razones:
a) Fuerte marejada o corriente que disminuya drásticamente la velocidad del remolcador y el remolcado, debido a su gran masa, conserva la inercia y se aproxima al remolcador. En este caso también el peso del remolque influirá en la aproximación de ambos. En un caso así es conveniente llevar un remolque largo y a poca velocidad.
b) Fallo de máquina del remolcador que le deje sin medios de propulsión, creándose una situación de aproximación con inminente peligro de abordaje si no se toman las medidas de urgencia necesarias. En este último caso vamos a considerar tres circunstancias: remolque corto, mediano y largo. Con un remolque corto, el peligro es inminente y se deberá largar inmediatamente el remolque y poner timón todo a la banda para separarse de la derrota del remolcado. Con un remolque de mediana longitud, de unos 100 a 200m. en el momento de pararse la máquina se debe poner el timón todo a la banda y tener todo listo para largar el remolque solamente en caso de peligro. Con un remolque de más de 200m., en el momento de quedarse el remolcador sin máquina, se pondrá todo el timón a la banda y se estará listo para largar el remolque solamente en caso de inminente peligro. Se colocan las clavijas Norman lo más cerca posible de la popa dejando el cable de remolque entre ellas para que en ningún momento el cable de remolque tire de través, pues hay que pensar que el remolcador está prácticamente parado y el remolcado sigue con arrancada avante. Si no fuera posible colocar el cable en la popa, se abozará éste con una mordaza “Carpenters” por medio de un cable firme en popa en la línea de crujía, y una vez entra en fuerza se lasca del cable de remolque hasta que éste llame por la popa, momento en que se larga la mordaza.
En un remolque largo y en aguas poco profundas, si el remolcador se queda sin máquina, se puede ir largando cable de remolque hasta que quede bien enganchado en el fondo, lo que frenará el avance del remolcador y del remolcado, quedando separados uno del otro.
Longitud del remolque
-
La longitud del remolque depende de varios factores, tales como:
-
período de la ola,
-
estado de la mar,
-
desplazamiento del remolcado,
-
composición del cable de remolque,
-
profundidad y velocidad de remolque.
Se procurará que remolcador y remolcado coincidan en la cresta o en el seno de la ola simultáneamente para asegurar una tensión de remolque constante. De lo contrario, si el remolcador entra en el seno de una ola y el remolcado sube una cresta se producirá un estrechonazo muy violento que puede romper el remolque. La longitud del remolque también dependerá del estado de la mar, pues con mar gruesa se deberá filar todo el remolque que se pueda, siempre teniendo en cuenta la profundidad para no enrocar. Se producirá una catenaria que absorberá las cargas dinámicas a que están sometidos remolcador y remolcado. Diremos que cuando mayor sea la velocidad de remolque, mayor deberá ser la longitud del cable de remolque. También dependerá del espacio de maniobra disponible, pues para navegaciones por estrechos, ríos o zonas de mucho tráfico, la longitud del remolque será la mínima. Por último, podemos decir que la flecha de la catenaria del remolque no debe ser inferior a unos 8 m. con buen tiempo y no menos de 12 m. con mar gruesa. Es preferible un remolque corto y pesado que uno largo y liviano.
Maniobra de dar el remolque
La maniobra para dar el remolque dependerá de varios factores muy importantes a tener en cuenta, como son: forma de la superestructura del remolcado, asiento aproante o apopante y si está en lastre o cargado. Todas estas circunstancias vamos a estudiarlas a continuación.
Equilibrio del buque a la deriva con respecto al viento.
Maniobra de acercamiento.
1. Debido a la superestructura.
1.1 Buque de puente a popa.
El buque adoptará una posición de equilibrio que recibirá el viento hacia proa del través. Para dar el remolque a un buque que esté en esta condición, el buque remolcador (supondremos en todos los casos un buque no dedicado al remolque) se pondrá popa al viento y se dirigirá hacia la proa del remolcado pasando cerca de él y a la velocidad mínima que le permita gobernar y al estar ambas proas próximas, se pasa la guía que se tendrá preparada y fija a un cabo intermedio de remolque y que se cobra rápidamente desde el remolcado. Se tendrá mucho cuidado en que el cabo de remolque no vaya a la hélice cuando se dé atrás para parar la arrancada del remolcador. Una vez parado éste, el abatimiento será aproximadamente igual al remolcado si son del mismo tamaño, por lo que ambos buques se mantendrán a una distancia prudencial, pero no excesiva para poder pasar el cable de remolque con seguridad y sin gran esfuerzo. Esta maniobra de aproximación se empezará cuando remolcador y remolcado estén bien informados de la maniobra a realizar y esté todo preparado para realizarla. Si fallara la maniobra de pasar la guía, el remolcador dará la vuelta por sotavento del remolcado y repetirá la misma maniobra. Si el remolcado estuviese proa al viento, la mejor manera para pasar el remolque será hacer el remolcador un rumbo perpendicular al viento acercándose a una distancia prudencial de la proa del remolcado de forma que una vez parada la arrancada, el viento le vaya abatiendo en dirección del remolcado y poder pasar la guía. Se darán unas paladas avante para hacer rebasar la proa del remolcado y quedar libre de él, pues el remolcador, al estar atravesado al viento, abatirá más que el remolcado. En esta condición podría pensarse que sería más fácil aproximarse por popa y hacer un rumbo paralelo al remolcado, pero podría ocurrir que, al dar atrás para parar la arrancada, el remolcador arribe y se atraviese al viento aproximándose peligrosamente al remolcado. Si por las condiciones de mar gruesa y el estado de carga del remolcador (por ejemplo, con una gran cubertada, etc.) fuese peligroso atravesarse a la mar, hará la aproximación por popa del remolcado y recibiendo la mar por la amura. En realidad, salvo un equilibrio del remolcado entre el viento, oleaje y corriente, no es probable que quede proa a las olas.
1.2 Buque de puente a proa.
En este caso el buque quedará en una posición de equilibrio recibiendo el viento por popa del través o por la popa. Para pasar el remolque a un buque en esta posición, el remolcador se aproximará por popa por barlovento con viento de popa o de aleta y pasará a unos 30 m. del remolcado, dándole la guía y dando atrás para parar la arrancada y asegurándose de que tenga en todo momento la popa libre de la proa del remolcado. Como éste recibirá el viento más de costado, abatirá más rápidamente que el remolcador, que lo recibe de popa. 33 Si el remolcado estuviese popa al viento, el remolcador hará su aproximación por cualquier costado, y al estar a la altura de él, le pasa la guía y a continuación el cable de remolque.
1.3 Buque de puente al centro.
En este caso el buque quedará en una posición de equilibrio atravesado al viento. Para pasar el remolque, el remolcador hará su aproximación por la popa con rumbo más cerrado para pasar a unos 30 m. de la proa del remolcado y calculando en todo momento el abatimiento del remolcador para que al llegar a la posición no quede demasiado cerca de la proa del remolcado. En este momento se pasa la guía y se da atrás una vez rebasada la proa para parar la arrancada y se tiende enseguida el remolque. Cuando dadas las condiciones de mar y carga del remolcador, éste no pueda atravesarse a la mar, para dar la guía hará un rumbo popa al viento y mar pasando a unos 30 m. de la proa del remolcador y al estar en la posición dará la guía, y una vez la popa esté libre de la proa del remolcado, dará atrás para parar la arrancada y dar el cable de remolque.
En las situaciones en el que el remolcado esté atravesando al viento y oleaje se deberán tener en cuenta las siguientes circunstancias para efectuar la aproximación:
a) Los buques abaten con igual velocidad: Si observamos el tamaño similar de ambos buques y en las mismas condiciones de carga, se puede suponer que el abatimiento sería a igual velocidad. Otra variante podría ser la disposición de la superestructura que podría hacer adoptar posiciones iguales o diferentes al quedar a la deriva. Pero suponiendo que ambos factores sean semejantes, el remolcador se acercará al remolcado por barlovento con rumbo convergente hacia su proa, quedando parado a unos 30 m. de ella.
b) Los buques abaten con diferente velocidad: En este caso diremos que, si el remolcador es más ligero que el remolcado, deberá pasar por barlovento para pasar la guía, y si es más pesado y abate menos, se aproximará por sotavento para que así el remolcado se le aproxime y sea más fácil pasar el cable de remolque. En ambos casos se puede ver claramente que si el tamaño de los barcos es muy diferente, el mayor proporciona mucho socaire al menor, facilitando así la operación de dar el remolque. En esos casos el buque de barlovento puede echar aceite para calmar las olas en caso de mar gruesa. Si no se tiene o no se consigue pasar la guía con el lanzacabos, se puede pasar el remolque amarrando un flotador o un bidón a un cabo fino y se echa por la popa del remolcador, éste describe una circunferencia alrededor del remolcado por barlovento y el viento le llevará el flotador. Otro procedimiento consiste en echar un flotador con un cabo guía por sotavento del remolcado, llegando con el viento y el oleaje al remolcador.
Debido a su asiento.
2.1. Buque con asiento apopante:
Su posición de equilibrio le dejará de aleta o popa al viento ya que al tener el centro de resistencia lateral desplazado hacia popa, ésta ofrecerá más resistencia al agua, haciendo arribar la popa.
2.2. Buque con asiento aproante: No es normal que un buque tenga un pronunciado asiento aproante, pero podría darse el caso de un buque con una vía de agua a proa y quedara en esta posición. Al contrario del caso anterior, el centro de resistencia lateral se habrá trasladado hacia proa, por lo que, al ofrecer mayor resistencia quedará de amura o de proa al viento.
Afirmado del remolque
Vamos a considerar dos casos:
1. Remolque efectuado por un remolcador: Una vez hecha la aproximación al remolcado y la maniobra esté preparada en la popa, se pasa la guía o sisga, que tanto puede ser lanzada por el remolcador como por el remolcado y, una vez pasada, se amarra al chicote de un cabo llamado “mensajero”, de suficiente resistencia para pasar un cable. El mensajero se jala desde a bordo del remolcado y en su chicote lleva un cable de unos 45 a 60 m. y de unos 5 cm. de diámetro. Una vez el cabo a bordo, se desentalinga el ancla y la cadena se engrilleta al cable, pasándolo previamente por la gatera “panamá”. El otro extremo del cable va engrilletado a una estacha de nylon de 100 a 150 m. de longitud y de suficiente mena, incluso se puede poner en doble para dar mayor elasticidad al remolque. Para evitar que la estacha intermedia pueda filarse completamente debido al peso del cable antes largado, se puede abozar con un cabo fino. El chicote de la estacha intermedia se engrilleta al cable de remolque. Una vez largado parte del remolque y esté completamente clara la maniobra en ambo barcos, el remolcador dará avante muy despacio y a medida que el cable entre en fuerza se va lascando cable de remolque y, en el remolcado, al entrar algo en fuerza la cadena, se va desvirando poco a poco hasta dejar unos 2 ó 3 grilletes para formar la suficiente catenaria para amortiguar los grandes estrechonazos con fuerte oleaje. Se tendrá muy en cuenta la profundidad por donde se va a navegar para evitar que ambos buques entren en “hierros”. Si esta maniobra hay que hacerla con mal tiempo y con gran rapidez por encontrarse el remolcado en peligro, después de recuperar el “mensajero” se hace firme el cable directamente en las bitas del castillo, repartiendo la tensión en diversos puntos fijos. La cadena del remolcado quedará frenada en el molinete y el barbotín engranado. Se colocará el estopor y la boza. El lector puede recurrir a la referencia para ampliar esta parte
2. Buque que remolca a otro buque: El buque remolcador preparará dos ramales de cable de 40 a 60 m. de longitud cada uno y se engrilletan al mayor de los grilletes disponibles a bordo, para formar un pie de gallo. Se afirman los chicotes a bordo en diferentes puntos para repartir la carga, incluso llevándolos hacia proa a otras bitas o alrededor de superestructuras. Se afirma al grillete del pie de gallo una estacha de nylon de unos 100 m. para dar elasticidad al remolque. En el buque a ser remolcado, se saca el cable de remolque, que generalmente va estibado en el pañol de proa y se aduja en el castillo. Se bloquea un ancla y se desentalinga la cadena (esta operación puede ser muy laboriosa y algunas veces hasta imposible debido a las condiciones de la mar o la urgencia del caso. Se engrilleta el cable de remolque a la cadena y el otro chicote del cable se amarra a un “mensajero” y éste a su vez a la sisga. Una vez preparada la maniobra, el remolcador se aproxima al remolcado pasando la sisga éste o el primero, se jala de ella y al llegar al mensajero lo pasa al cabirón del cabrestante o maquinilla de popa y va virando a medida que el remolcado va filando cable de remolque, y al tenerlo todo a bordo del remolcador lo engrilleta a la estacha intermedia. Una vez unido el remolque, el remolcador da avante muy despacio y se va tensando el remolque, obligando a la cadena del remolcado a salir por la gatera “panamá” mientras se va desvirando con el molinete engranado. Cuando hayan salido de 2 a 3 grilletes de cadena, se frena el barbotín y se coloca el estopor y la boza de la cadena. La comunicación entre remolcador y remolcado será permanente para indicar en todo momento la maniobra a realizar.
Remolque de un buque sin timón
Para remolcar a un buque que ha perdido el timón, se tendrá en cuenta su velocidad normal de crucero, pues si ésta es mayor que la del remolcador, el remolque se dará por la popa del buque sin gobierno y cambiando el rumbo el remolcador para mantener el rumbo que debe llevar el remolcado. Si la velocidad del remolcador es mayor que la del remolcado, o se debe navegar por zonas de mucho tráfico, el remolcador pasará el cable de remolque al buque siniestrado tirando de él a una determinada velocidad, pero como el remolcado dará máquina avante, la resistencia del remolque será pequeña y el efecto del remolcador será solamente servir de timón al remolcado.
Remolque por popa.
Puede suceder que un buque siniestrado quede a la deriva con la popa fuera del agua o que se hubiese partido en dos partes y solamente quedará la parte de popa. Para efectuar el remolque se puede emplear uno o dos remolcadores. Será mejor con dos si se debe navegar por zonas estrechas y de mucho tráfico para evitar que el remolcado pueda dar grandes guiñadas al no tener sistema de gobierno. Se preparan dos pies de gallo, uno a popa que se afirmará al triángulo y cable de remolque de delante y el otro se afirma al triángulo y cable del remolcador de atrás. El remolcador de popa desarrollará menos velocidad que el de proa para hacer de ancla flotante al buque siniestrado y mantener la estabilidad de rumbo, disminuyendo así la guiñada.
Comunicación entre remolcador y remolcado
Desde el primer contacto que se establezca entre remolcador y remolcado mucho antes de dar el remolque, ambos tendrán un sistema de comunicaciones por radio en VHF o receptor/transmisor portátil. Los capitanes se trazarán un plan de actuación que comprenderá la aproximación del remolcador y los preparativos que debe realizar cada buque, saber si el buque siniestrado está en condiciones operativas como para poder dar su cable de remolque, o por lo menos preparar un ramal de cadena para afirmarlo al cable que le dé el buque que le va a remolcar, que puede ser que no sea un buque remolcador, y por tanto, no dispondrá de todo el material deseable para dar un remolque con seguridad. Durante la navegación, si el remolcado va tripulado, se pueden hacer señales Morse con el “aldis” para llamar la atención o conectar la radio en el canal acordado. En las maniobras de puerto, el Práctico se comunica con el remolcador por VHF o por medio de pitadas o grupos de pitadas que indica cada una la maniobra a realizar.
Navegar con remolque
La velocidad del remolcador al principio debe ser la mínima hasta ir tensando el remolque. El remolcador siempre tirará en la línea proa-popa del remolcado y los cambios de rumbo los irá haciendo con metidas de timón de 10º. Cuando el remolcador tenga que hacer un cambio grande lo avisará al remolcado y entonces éste pondrá el timón a la banda contraria hasta tener la proa enfilada con la línea proa-popa del remolcador.
Cuando el remolcador hace un cambio de rumbo se forma un ángulo entre la línea proa-popa y el cable de remolque, apareciendo un par de fuerzas F y –F. Si el remolcado pusiese también el timón a babor, al caer la proa actuaría en contra del par evolutivo del remolcador, con peligro de hacerle zozobrar. Para evitarlo se pondrá el timón del remolcado unos grados a la banda contraria a fin de disminuir el ángulo a, y cuando la proa del remolcado esté en línea con proa-popa del remolcador, empezará a poner el timón a babor.
Si el remolque no fuese tripulado, cuando el remolcador deba hacer un cambio grande de rumbo, hará firme la retenida de remolque o colocará la clavija Norman a una de las aletas para evitar que el cable de remolque llame de través. Uno de los grandes peligros a que está expuesto el remolcador es que el cable de remolque le llame de través, pues al formase un par de fuerzas, cuyo brazo será la 38 distancia vertical que separa el punto de afirmado del remolque y el gancho o chigre de remolque del remolcador, al vencer el momento del par de estabilidad transversal del remolcador, se producirá el vuelvo o zozobra rápidamente. Cuando el cable quede de través, inmediatamente se pondrá el timón a la banda para obligar a la popa del remolcador ponerse en dirección del cable de remolque y estar preparados para largar el remolque en caso de inminente peligro.
Remolque con mal tiempo
Las condiciones meteorológicas jugarán un papel muy decisivo en la realización con éxito de un remolque. Se deberán tomar todas las precauciones posibles para evitar daños personales a la tripulación y averías al remolcador y remolcado. Se tendrán muy en cuenta la longitud de remolque más conveniente según el período de la ola de forma que el remolcador y remolcado queden sobre dos crestas o entre dos senos. También se mantendrá una velocidad mínima en el caso de producirse grandes estrechonazos, pero que permita tener en todo momento el control del remolque. Se evitará acercarse demasiado a la costa para evitar verse empeñado en ella y no tener la suficiente cancha libre para salir de la misma. En las siguientes imágenes se pueden observar de manera resumida las formas más usuales de dar remolque según las necesidades de cada caso.
Operaciones de remolcadores
Largando el cabo de remolque
Los mismos efectos alrededor de la proa de un buque con arrancada, como se mencionó anteriormente, intervienen con respecto al remolcador y su comportamiento cuando largamos el cabo de remolque. El remolcador de nuevo está muy cerca de la proa con el cabo en banda para permitir a la tripulación del asistido desencapillar de las bitas y arriarlo a la cubierta del remolcador. Por lo tanto, cuando largamos la velocidad del buque no deberá ser superior a la velocidad segura para hacer firme. Esto, sin embargo, puede llegar a ser problemático para determinados buques debido a que cuando abandonan el atraque, terminal o dársena portuaria los buques pueden incrementar su velocidad rápidamente. Largar los remolcadores deberá estar bien planeado con antelación, y en particular cuando el remolcador de proa ha sido hacho firme proa-proa.
Una vez llegado a este punto podemos deducir de los tres epígrafes anteriores los siguientes aspectos:
· Los remolcadores han de ser apropiados para las operaciones solicitadas como remolcador de proa, proa-a-proa, o popa-a-proa. Cuando se solicite hacer firme proa-a-proa, la capacidad del remolcador para operar atrás con respecto a la velocidad del buque serán bien conocidas, teniendo en cuenta las condiciones de la mar.
· Para operaciones proa-a-proa la aproximación desde una posición adelantada se considera la más segura ya que, consecuentemente, no hay riesgo de golpear los finos lanzados de especialmente buques portacontenedores con la superestructura del remolcador.
· Con el remolcador apropiado, la velocidad segura del asistido para conectar proa-a-proa es aproximadamente de 5 a 6 nudos. Para estos remolcadores se puede elevar la velocidad un poco tan pronto como el cabo de remolque se haga firme, dependiendo siempre de las condiciones en las que se encuentre el estado de la mar. Para remolcadores stern drive azimutales menos apropiados para operar atrás, estas velocidades pueden ser considerablemente más bajas.
· Cuando larguemos el cabo de remolque la velocidad no será mayor que la velocidad de seguridad al hacer firme. Por lo tanto, el largado de los remolcadores deberá estar bien planteado con antelación, en particular cuando el remolcador de proa este hecho firme proa con proa.
· Los riesgos para los remolcadores son más pequeños durante el proceso de hacer firme proa- a-proa comparando con hacer firme popa - a – proa. Difícilmente existe riesgo de golpear el casco del buque asistido con el remolcador, golpear el bulbo con los propulsores, o coger una estacha en el agua con las hélices.
· Cuando se hace firme proa - a – proa el patrón del remolcador tiene una vista óptima sobre la maquinilla y las operaciones con el cabo de remolque.
Aspectos operacionales
· Proa-a-proa y empuja-tira Una gran ventaja de hacer firme proa-a-proa es que en buques entrantes el remolcador puede fácilmente cambiar, cuando nos aproximamos al atraque, de remolcar a empujar-tirar al costado del buque sin necesidad de largar el remolque. Esto, sin embargo, no es de mucha ventaja en el caso de portacontenedores y carcarriers debido a sus pronunciados finos.
· Control de los impulsores La operación de los impulsores por controles separados es más lógica cuando los remolcadores stern drive azimutales están trabajando proa-a-proa, o en otras palabras: operan “popa primero”. El remolcador irá siempre en la dirección en que coloquemos los impulsores. Este es el mejor y más fácil modo de operación y gobierno. Cuando el remolcador está operando popa-a-proa, o lo que es lo mismo “proa primero”, el gobierno y manejo del remolcador por dos controles separados de los impulsores es más complicado. Este es un aspecto a considerar cuando el patrón del remolcador esté trabajando en situaciones críticas o cerca de los límites del remolcador, cuando no se puede cometer ni el más mínimo error.
· Ancho del canal requerido Este es un factor que puede llegar a ser relevante cuando el espacio de maniobra para el remolcador es limitado pero aún se precisa de una elevada fuerza, por ejemplo en esclusas, astilleros o puentes. 59 Suponiendo el mismo tamaño de remolcador y longitud del cabo de remolque, de la figura 6 se puede deducir que cuando un remolcador está trabajando popa-a-proa necesitamos menos espacio, aproximadamente la mitad de una eslora del remolcador, cuando el asistido necesitará recibir la mayor fuerza lateral. También la longitud total del buque y remolcador de proa es un poco menor cuando remolcamos popa-a-proa, lo cual puede ser una ventaja cuando el espacio es limitado, por ejemplo en curvas y cerca de muelles. Se deberá, sin embargo tener en cuenta que en esos casos el remolcador tira con un cabo de remolque corto, la fuerza efectiva de remolque puede verse considerablemente reducida por el efecto negativo del aguaje de la hélice del remolcador golpeando sobre el casco del buque. Muchas veces los patrones de remolcadores y prácticos infravaloran este importante aspecto del efecto negativo del aguaje de la hélice del remolcador, que está en relación a la longitud del cabo de remolque.
· Olas En el caso de las olas cuando operamos proa-a-proa, el remolcador romperá la mar de popa. Esto puede llegar a ser problemático dependiendo del diseño de la popa del remolcador y, desde luego, de las condiciones de la mar. Si se diera el caso, se debería considerar para un remolcador ASD cambiar a trabajar por la popa, popa-aproa, o de otra forma deberíamos reducir, si es posible, la velocidad del buque asistido.
· Baja visibilidad En el caso de mala visibilidad, operar proa-a-proa con un buque con arrancada puede llegar a ser una operación arriesgada. Es necesario que el patrón del remolcador mantenga una gran atención, tendrá que vigilar su derrota, el remolcador, la proa del buque asistido y el cabo de remolque cuidadosamente, observando la pantalla del radar regularmente. Pero la pantalla del radar puede estar localizada de tal manera que no pueda ser observada apropiadamente cuando navegamos atrás. Más aun, la línea de proa está 180º “equivocada”. Todo esto hace la operación proa-a-proa en condiciones de niebla un trabajo arriesgado.
· La experiencia del Capitán de remolcador Como ya se ha mencionado en varias ocasiones a lo largo de este capítulo, el patrón de remolcadores deberá estar experimentado en el manejo de su remolcador en concreto y en los métodos de asistencia que usará. 60 La experiencia del patrón del remolcador puede, por lo tanto, ser un factor a tener en cuenta para elegir cuál sería el método más apropiado.
· Cooperación práctico-capitán del remolcador Una cooperación óptima, comunicación y buen entendimiento entre el práctico y el capitán del remolcador es esencial para una maniobra segura y eficiente y para la seguridad de los remolcadores implicados, y sobre todo para el remolcador de proa en particular cuando está trabajando proa-a-proa. Cuando el remolcador de proa está haciendo firme por ejemplo proa-a-proa o está operando con un cabo corto está muy cerca de la proa del barco con arrancada y a menudo en la dirección del avance del barco. En la mayoría de los casos el remolcador no está a la vista del práctico. Un buen contacto entre el práctico y el patrón del remolcador es absolutamente necesario entonces, particularmente en lo relativo a la velocidad de seguridad. Cuando se considere que la velocidad del buque es un poco elevada para el remolcador, mientras el buque navegue derecho y no precise la asistencia del remolcador, los capitanes de remolcadores convencionales prefieren en algunos casos tener el remolcador, con el cabo en banda, en una posición algo más segura próxima a la derrota del buque. Si la velocidad del buque tuviera que ser demasiado alta para el remolcador (o cuando pudiera ocurrir con el remolcador), el buque no colisionaría con el remolcador. Tiene, además, la ventaja de que el práctico puede fácilmente ver el remolcador. Los patrones de remolcadores stern drive azimutales podrían seguir el mismo procedimiento cuando operan popa-a-proa. Cuando se opera proa-a-proa este procedimiento no funciona debido a la comprometida situación cerca de la proa e inestable comportamiento del remolcador. Cuando se navega paralelo como se describe arriba existe la ventaja adicional de que el capitán del remolcador puede observar en el costado del buque el movimiento del mismo. Él puede ver si el buque mantiene el rumbo derecho, o comienza a caer y en qué dirección, etc. El patrón del remolcador puede entonces anticipar el momento de la maniobra. En el caso de remolcar proa-a-proa el capitán del remolcador está justo en la proa del remolcador y no tiene indicación de si el barco comienza a caer o no, en ese momento buque y remolcador están en diferentes derrotas, lo cual es peligroso con velocidad, como ya se ha explicado en los epígrafes anteriores.
Esta es una de las desventajas de operar proa-a- proa y también una razón para una óptima cooperación entre el capitán del remolcador y el práctico.
· Alternativa para operaciones proa-proa o popa-a-proa Si por alguna razón, por ejemplo, una velocidad del buque demasiado alta en poca avante, el remolcador de proa no puede trabajar ni proa-a-proa ni popa-a-proa, a menudo una buena alternativa de trabajo es hacer firme el remolcador de proa tal y como se muestra en la siguiente figura. Cuando la velocidad del buque disminuya el remolcador puede cambiar, si es necesario, a trabajar proa-a-proa y podrá aplicar el método empuja-tira cuando llegue al muelle. Este es un método que se usa a menudo ya que los buques asistidos suelen tener una velocidad en arrancada más alta que la mayor velocidad de seguridad del remolcador.
Conclusiones Las conclusiones más relevantes con respecto al uso de remolcadores y en especial al uso de stern drive azimutales como remolcador de proa para operaciones proa-a-proa están resumidas a continuación:
· A la vista de este trabajo creemos que el sistema de propulsión azimutal ha sido de gran importancia en los remolcadores, ya que este sistema facilita enormemente las maniobras. · El uso de remolcadores, se extiende día a día por las indudables ventajas que su empleo tiene para el traslado de barcos u objetos flotantes de un lugar a otro, así como por la mayor seguridad y rapidez que facilitan para las maniobras en puerto.
· Los remolcadores se pueden clasificar según la clase de maniobra que realicen, como por ejemplo los remolcadores de salvamento y rescate, remolcadores de lucha contraincendios, remolcadores de puerto, etc. También podemos usar una clasificación atendiendo a su sistema de propulsión, como por ejemplo los remolcadores de propulsión convencional, propulsión azimutal a popa, etc.
· Como hemos visto el buen estado de los elementos de remolque y una buena preparación de éstos, juegan un papel importante, ya que de ello depende que se puede realizar la maniobra de remolque de una forma segura y sin ningún tipo de riesgo.
· A la hora de iniciar la maniobra de remolque debemos tener en cuenta factores como el estado de la mar, el tamaño del barco a remolcar, etc. De esta forma podremos elegir la maniobra más segura a la hora de dar remolque para así evitar riesgos de daños tanto para el remolcador como para el barco asistido
UNIDAD 6.
SITUACIONES RELATIVAS
Determinación de Rumbo y Velocidad relativa de un buque extraño (triángulo de velocidades). Cálculo del rumbo relativo y velocidad relativa a fin de evitar colisiones. Determinación de la mínima distancia de paso tanto por la proa como por la popa. Determinación de un rumbo colisión. Maniobras a ejecutar para su evasión. Comunicaciones con un buque extraño para coordinar maniobras de paso. Formas de calcular el rumbo y velocidad de un buque extraño cuando no tengo comunicación y/o funcionamiento de elementos electrónicos.
TELÉMETRO
El telémetro es un instrumento óptico utilizado para medir distancias.
Se basa en el método matemático de la triangulación.
La distancia se calcula ajustando la visión de las dos imágenes que el visor nos da del objeto. Se observa el objeto, cuya distancia se va a medir, a través de dos visores y en el ocular se ven dos imágenes no coincidentes o sea desacopladas. Por medio del anillo de enfoque se logra que las imágenes se superpongan y al mismo tiempo, en una escala grabada sobre el anillo, se muestra la distancia que va de la máquina al objeto en el momento del enfoque correcto.Al usar el telémetro se toma una distancia fija, la que existe entre los dos visores, que es equivalente a la AB de la figura y por métodos mecánicos y ópticos se calcula la distancia al objeto (equivalente a la distancia AC).
La lente giratoria de la figura se mueve con el anillo de enfoque. Al mismo tiempo que lo giramos la lente gira y se superponen según se va girando.
TIPOS
Óptico
Consta de dos objetivos separados una distancia fija conocida (base). Con ellos se apunta a un objeto hasta que la imagen procedente de los dos objetivos se superpone en una sola. El telémetro calcula la distancia al objeto a partir de la longitud de la base y de los ángulos subtendidos entre el eje de los objetivos y la línea de la base. Cuanto mayor es la línea de la base, más preciso es el telémetro.
Los telémetros mórficos se basan en cálculos mediante el uso de la trigonometría y se han venido utilizando en sistemas de puntería para armas de fuego, topografía y fotografía, como ayuda para el enfoque.
Ultrasónico
Se basa en un principio totalmente diferente. El telémetro emite un ultrasonido que se refleja en el blanco y el telémetro recibe el eco. Por el tiempo transcurrido y la fase del eco, calcula la distancia al blanco. Se puede encontrar este tipo de telémetro en algunas cámaras "Polaroid".
Telémetro láser
El telémetro láser es capaz de realizar medidas de distancia de forma automática como el ultrasónico, pero con mayor exactitud que el telémetro óptico. Esto se debe a que el rayo se refleja en una zona muy reducida del blanco y va modulado, de modo que puede combinar las dos técnicas anteriores.
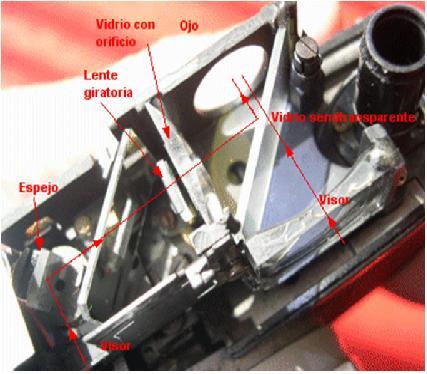
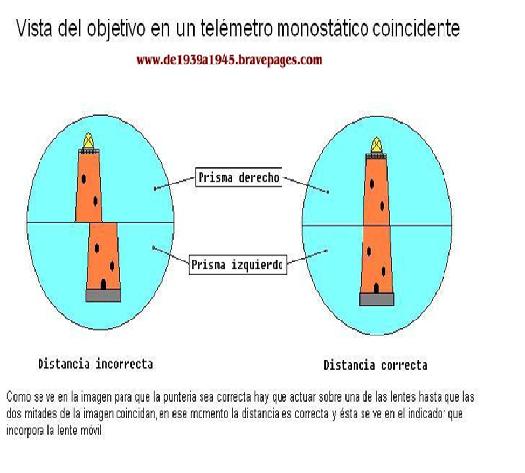
CINEMATICA
¿LA CINEMATICA QUE ES?
- La cinemática naval permite calcular el movimiento relativo de un barco B respecto a un barco A (tomado como nuestro) cuando se conocen los rumbos y velocidades de ambos.
- En otras palabras, nos interesa saber cuál es el movimiento de B respecto a nosotros, llamado movimiento aparente, como resultado combinado de los movimientos absolutos (o sea, respecto al fondo del mar) de ambos barcos.
- Evidentemente es el movimiento aparente (o movimiento relativo) del barco B el que determinará si existe riesgo de colisión con él y, por tanto, si hemos de efectuar alguna maniobra de evasión
Tres suposiciones básicas se admiten como válidas
- 1. Los barcos se mueven siguiendo derrotas rectas y a velocidad uniforme.
- Se desprecian cambios de rumbo o guiñadas y frenazos o acelerones debidos por ejemplo a las olas.
- 2. Cuando un barco cambia el rumbo este cambio tiene lugar instantáneamente y ocurre sobre el centro de gravedad del barco.
- Se desprecia la existencia de la curva de evolución en el giro del barco.
- Los cambios de velocidad son instantáneos.
Cálculo de velocidad relativa
- El rumbo de nuestro barco es 60º y nuestra velocidad 6 nudos.
- A Hb 1240 observamos un buque B a una demora/marcación de 100º encontrándose a una distancia de 12 millas.
- Puestos al habla con B mediante el VHF, nos comunica que su rumbo es 345º y su velocidad 8 nudos.
Problema
- Queremos saber cuál es la velocidad relativa de B respecto a nosotros,
- si existe rumbo de colisión y
- a qué distancia mínima pasaremos de él en caso de mantener ambos barcos sus rumbos y velocidades actuales.
Resolución
- Pasará a una mínima distancia de 4.9 millas.
- Utilizando el compás y la escala obtenemos que la velocidad relativa de B con respecto a nosotros es de 8.6 nudos (ese es el módulo del vector V βα) mientras que la distancia relativa a navegar hasta el paso de B a la mínima distancia es de 11.3 millas.
- Por tanto, el tiempo que transcurrirá desde el momento actual (Hb 1240) en que hemos observado el eco del buque B hasta que éste se encuentre a la mínima distancia de nosotros es de t = 11.3 / 8.6 = 1 hora 18.8 minutos.
- El barco B se encontrará por tanto a la mínima distancia de nosotros cuando sean Hb 1358.8.
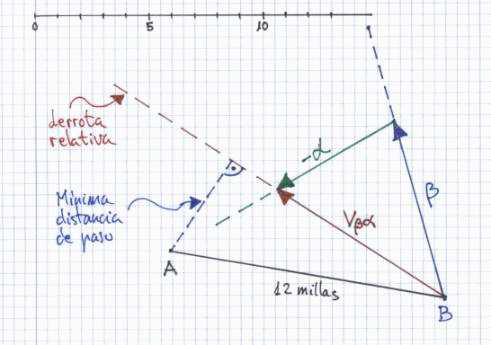
Hallar el rumbo y velocidad de otro buque conociendo su movimiento relativo
- ¿Cuál es la velocidad absoluta (rumbo y módulo) β del barco B?. Evidentemente, suponemos conocido nuestra velocidad α.
- Dibujando los ecos de B, llamémosles B1 y B2, y uniéndolos por una recta de- terminamos inmediatamente la dirección y sentido de V βα. Para saber su módulo no tenemos más que dividir la distancia entre B1 y B2 entre el tiempo transcurrido desde la observación del eco en B1 y la observación B2.
- Así que ya conocemos el vector V βα.
- Conocemos también el lado −α del triángulo de velocidades (pues conocemos nuestra velocidad α), así que el lado restante es la solución del problema, la velocidad absoluta β del barco B.
Ejemplo
- Navegando al rumbo verdadero 30º y a 12 nudos detectamos un buque B a Hb 0100, con una demora por los 350º a 9 millas.
- A Hb 0110 el eco/buque se encuentra a 6.5 millas por los 357º.
- Hallar el rumbo y la velocidad del buque B, distancia mínima a la que pasará de nosotros y hora de reloj de bitácora a la que esto sucederá.
Resolución
- Dibujar la información que se tiene
- El punto A que representa a nuestro barco y los puntos B1 y B2 que son las dos situaciones conocidas del barco B, separadas entre si por 10 minutos. Como son situaciones medidas desde nuestro barco, la recta que une B1 con B2 nos dará directamente la indicatriz del movimiento o derrota relativa.
- El vector velocidad relativa de B respecto de A, V βα, se construirá entonces con origen en B1 y en la dirección hacia B2.
- Para saber su módulo (su longitud) sólo hemos de tener en cuenta que B1 y B2 están separados por 2.0 millas (esto lo medimos directamente sobre la figura utilizando el compás y la escala) que han sido recorridas en 10 minutos.
- En una hora se habrán recorrido entonces 12 millas y ésta (12 nudos) ha de ser la longitud del vector V βα.
Entonces
- La mínima distancia a la que pasaremos de B será la perpendicular a la indicatriz que pasa por A y es 4.2 millas.
- La distancia relativa a navegar desde B1 hasta la situación de mínima distancia es de 8.6 millas.
- Puesto que la velocidad relativa es de 15 nudos, tendrán que pasar t = 7/15 = 0.46 horas = 27.3 minutos desde que el eco estaba en B1 (Hb 0100) hasta encontrarnos a la mínima distancia del buque B.
- Así que la mínima distancia entre ambos barcos tiene lugar a Hb 0127.3.
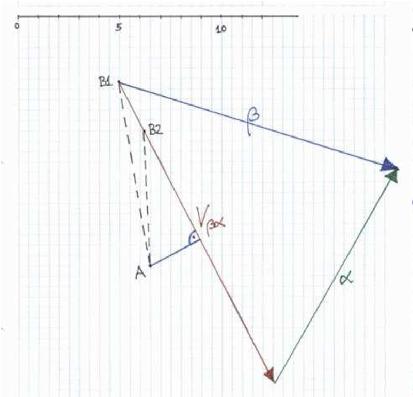
Cálculo del momento en que el buque B se encontrará a una distancia de A
- En este supuesto conocemos tanto nuestra velocidad α como la velocidad β del barco B así como la situación inicial de B respecto de nosotros. Queremos saber entonces cuanto tiempo ha de transcurrir desde la situación actual hasta que el barco B se encuentre a una distancia d de nosotros.
- Se situarán los puntos A y B y construir el triángulo de velocidades para obtener la velocidad relativa de B respecto a A, V βα, y, prolongando este vector, dibujar la indicatriz del movimiento:
- Cualquiera de los puntos del círculo de radio d centrado en A se encuentra, obviamente, a la distancia deseada d de A.
- Por tanto, la condición pedida se cumplirá cuando B se encuentre, en su movimiento relativo respecto de A a lo largo de la indicatriz y a velocidad V βα, en el punto C o en el punto C’.
- Sobre el dibujo anterior se mide utilizando la escala y el compás, el módulo de V βα y las distancias BC y BC’ con lo que se podrá calcular los tiempos t y t’ que han de transcurrir desde el momento actual representado hasta que B se encuentre en C o en C’, respectivamente.
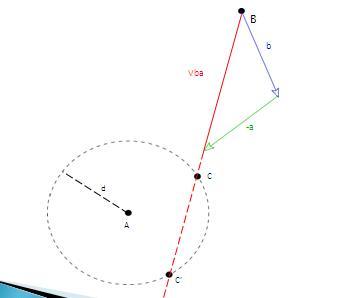
Viento aparente
- Si estás parado el viento aparente y el viento real es el mismo.
- Si andas en contra del viento a la velocidad del viento hay que sumarle tu velocidad.
- Si andas a favor del viento hay que restarle tu velocidad.
- Si tu velocidad a favor del viento es igual a la velocidad del viento real, el aparente es cero.
- Si viene por el través es la suma de vectores
¿Velocidad de 20 Ns con 8 Ns de viento?
- A medida que un barco de vela aumenta su velocidad, al viento real se suma el generado por la propia velocidad del barco.
- A esto se le llama el viento relativo o aparente. Al aumentar dicho viento aparente, el velero ya tiene más viento con el que generar más velocidad y así sucesivamente.
- En teoría podría seguir aumentando indefinidamente, pero el limite lo pone el coeficiente de resistencia (hidrodinámica y aerodinámica) que llega un momento que es superior al empuje que pueden generar las velas.
- Empiezan navegando con el viento por el través y a medida que ganan velocidad van trimando la vela para ceñir, logrando velocidades muy superiores a la del viento.
- Los catamaranes y trimaranes de la Copa América tienen mucha potencia vélica y poca resistencia, lo que les permite llevar al límite esa teoría, usando gennakers y foques enormes.
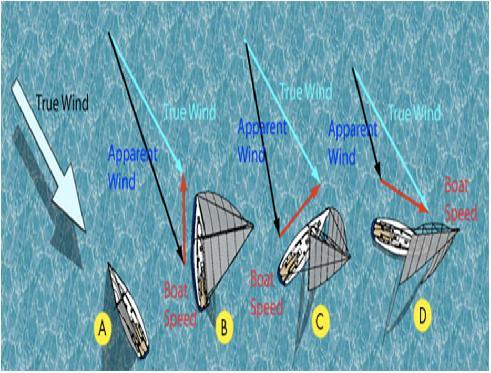
FIN DEL TEMARIO
Profesor Magister Osvaldo Aguirre
P